Режим техпроцесса
Область применения:
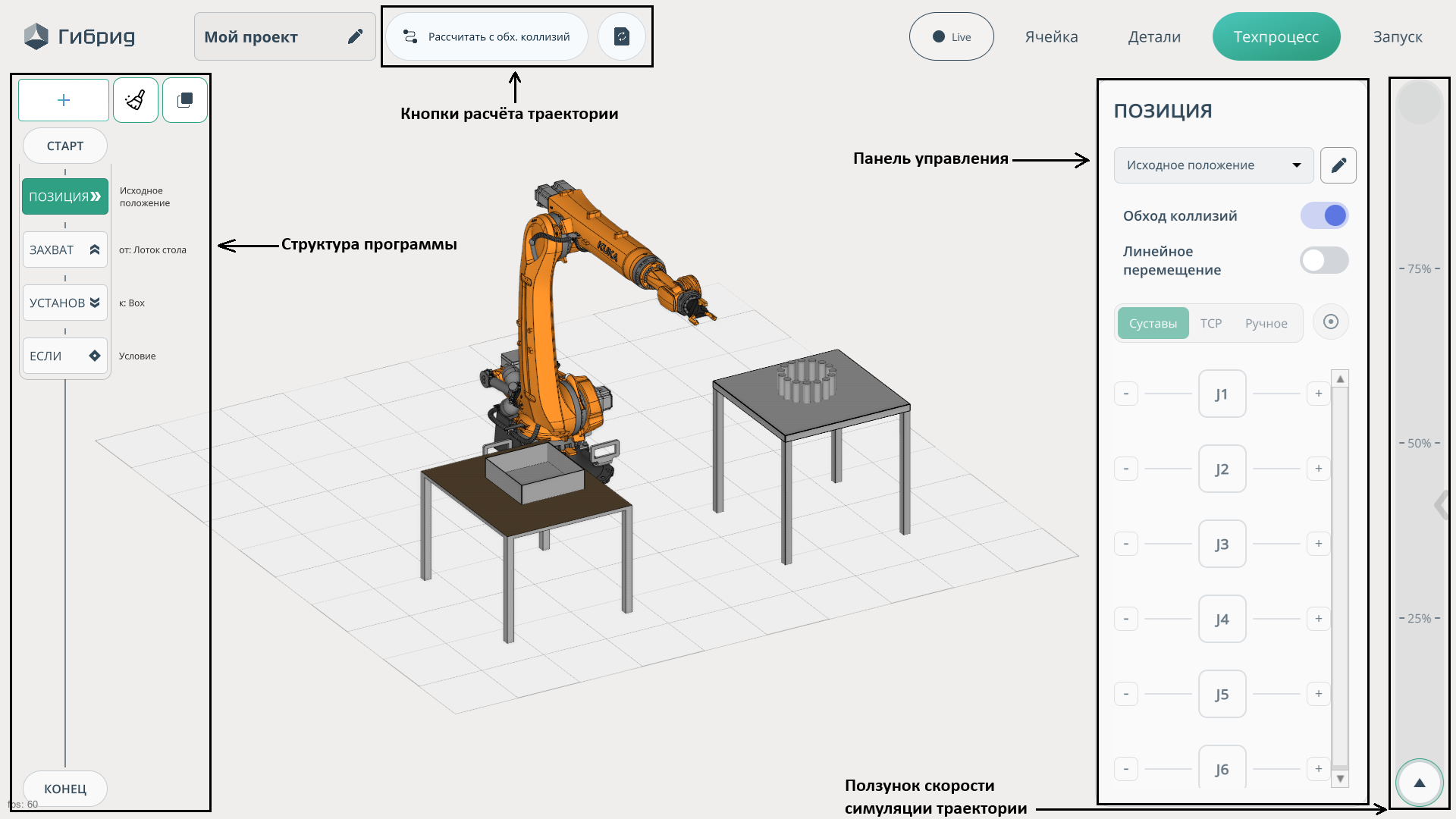
Режим Режим техпроцесса является ключевой рабочей средой, в которой теоретические планы реализуются на практике, а роботизированные системы приводятся в рабочее состояние. Он функционирует как многофункциональный центр управления — специализированное рабочее пространство для управления автоматизацией и конфигурации системы.
В режиме техпроцесса панель управления перемещается в правую часть экрана, а также добавляется дерево структуры программы.
Кнопки расчёта траектории
Быстрый расчёт. Выполняет расчёт траектории без учёта флажков в командах обхода столкновений.
Безопасный путь. Вычисляет траекторию с учётом обхода столкновений — только для команд, в которых данный флаг включён.
Ползунок симуляции.
Симуляция траектории (скорость регулируется ползунком).
Дерево структуры программы состоит из:
Кнопок:
Добавить команду. Позволяет добавлять базовые команды. 
Очистить. Удаляет все команды и сбрасывает программу в начальное состояние. 
Создать группу. Команды могут быть объединены в группы. После создания группу можно копировать, а также одновременно изменять назначение ячеек для всех команд внутри группы. Это позволяет эффективно работать с повторяющимися операциями для нескольких ячеек. 
Команды:
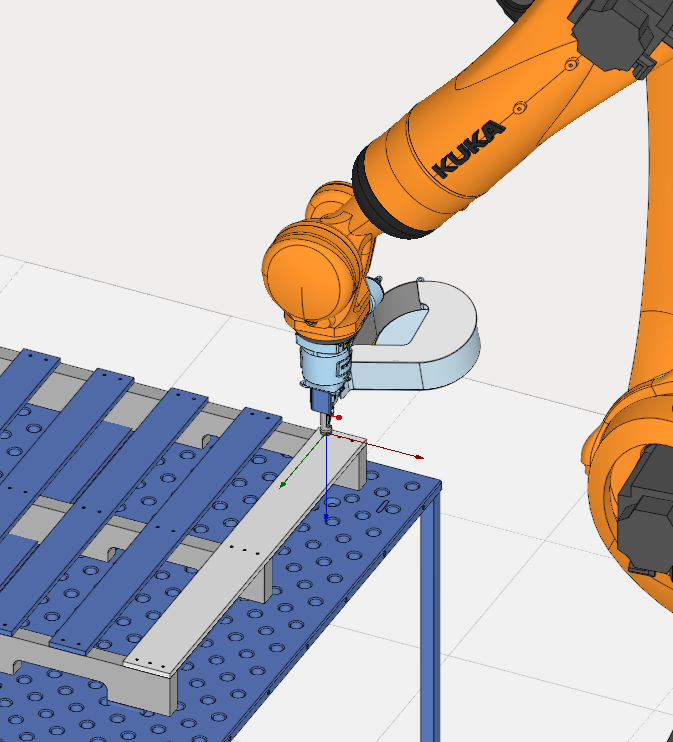
Старт. Задаёт начальное положение робота. В панели управления доступна навигация для перемещения робота в пространстве. Узнать больше
Конец. Задаёт конечное положение робота. В панели управления доступна навигация для перемещения робота в пространстве. Узнать больше
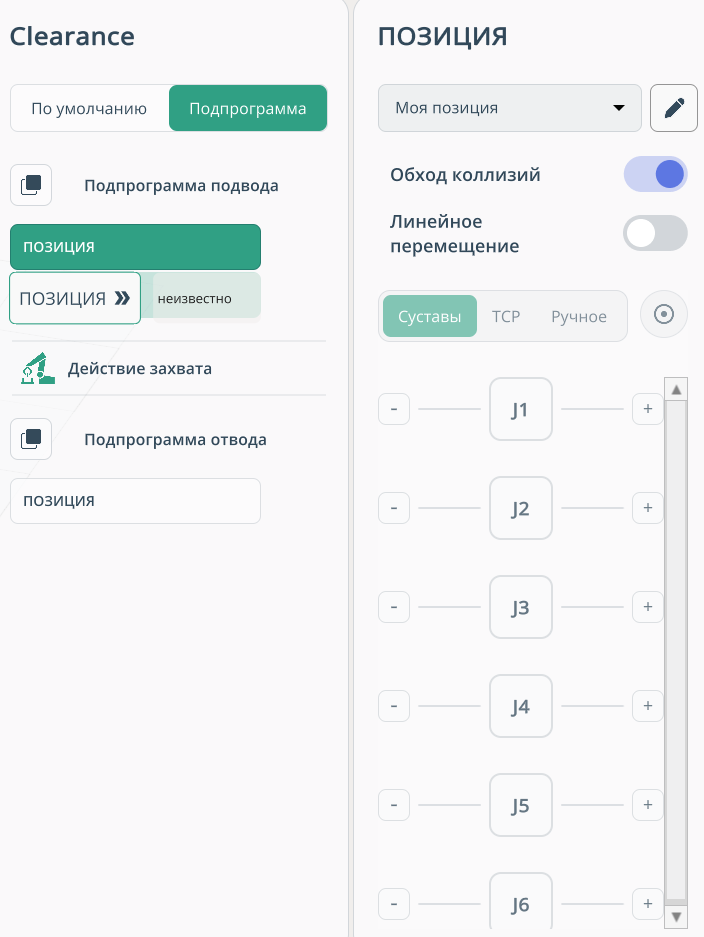
Позиция. Перемещает робота в заданную целевую позицию.
Состоит из:
Список позиций робота. В нём есть исходное положение робота и положения созданные пользователем.
Чтобы добавить новую позицию, выберите Пользовательская позиция, переместите робота в нужное положение и сохраните настройку.

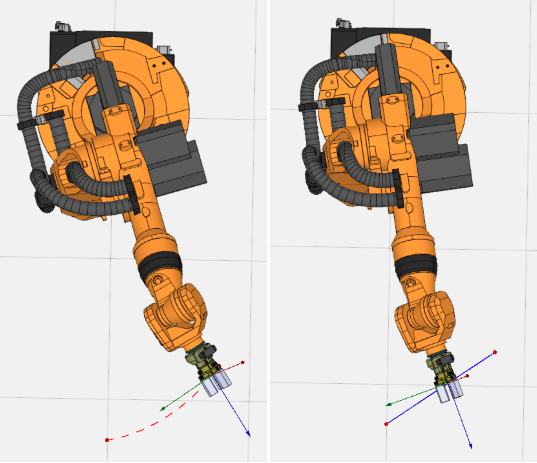
Обход столкновений. Позволяет рассчитывать безопасную траекторию для данного перемещения.
При запуске программы с помощью кнопки "быстрый расчёт" данный флажок игнорируется.
![]()
При использовании кнопки "Безопасный путь", если этот параметр включён для конкретного перемещения, автоматически рассчитывается траектория с обходом столкновений. В этом случае расчёт траектории занимает больше времени.![]()
Линейное перемещение. Позволяет выполнять линейное перемещение робота.
Навигация для перемещения робота в пространстве. Позволяет перемещать робота в пространстве различными способами. Узнать больше
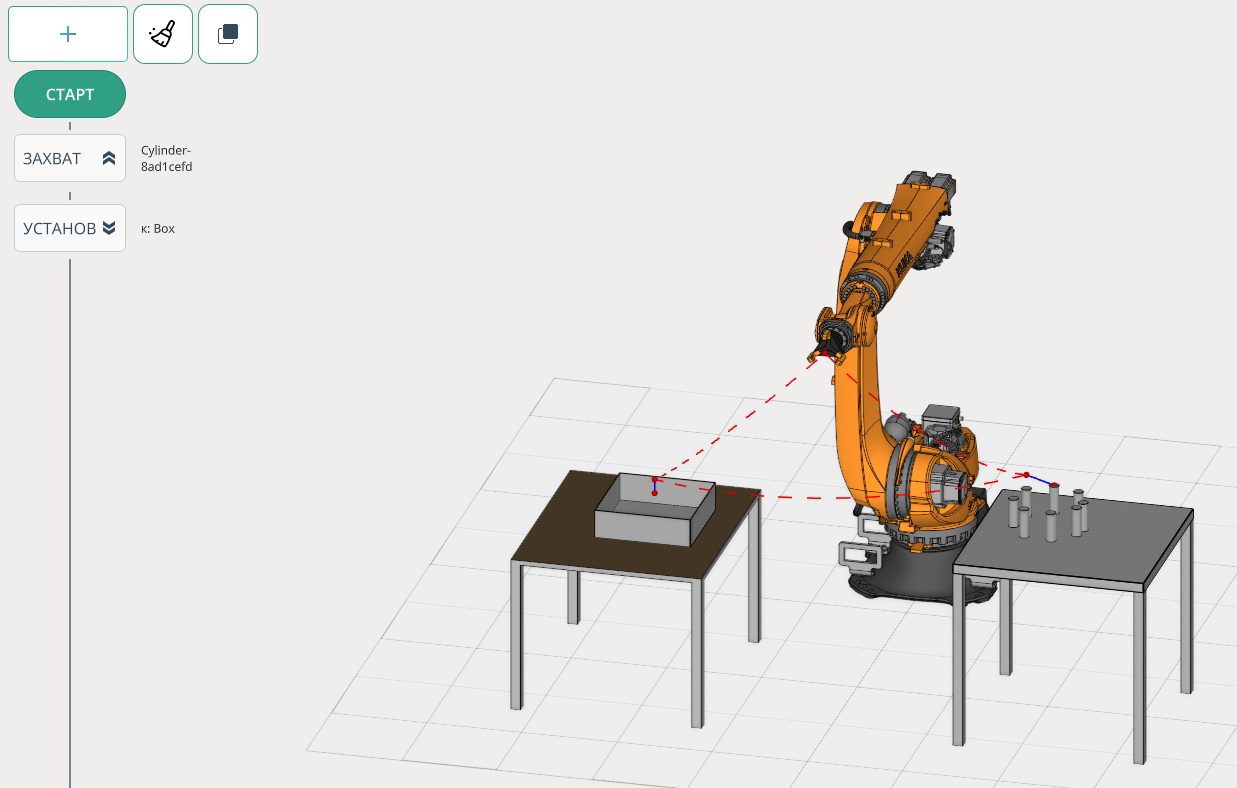
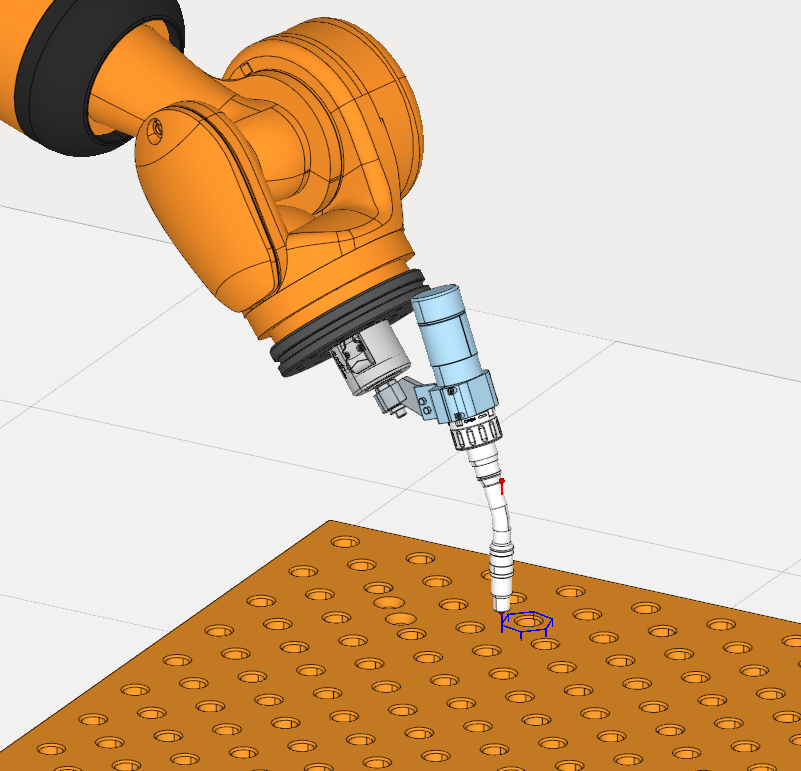
Захват и Установ. Позволяет роботу захватывать и размещать деталь.
Принципы работы:
Для того чтобы робот увидел деталь необходимо сперва на неё кликнуть ЛКМ. Инструмент захвата переместится к точке захвата детали. Если вы задали пользовательскую точку захвата, робот захватит её. Если вы не создавали пользовательскую точку захвата, то приложение возьмёт за основу точку захвата по умолчанию.
Чтобы деталь перенести необходимо создать команду "Установ" и выбрать ячейки куда нужно перенести детали.
Состоит из:
Панель управления будет изменяться в зависимости от выбранной команды.
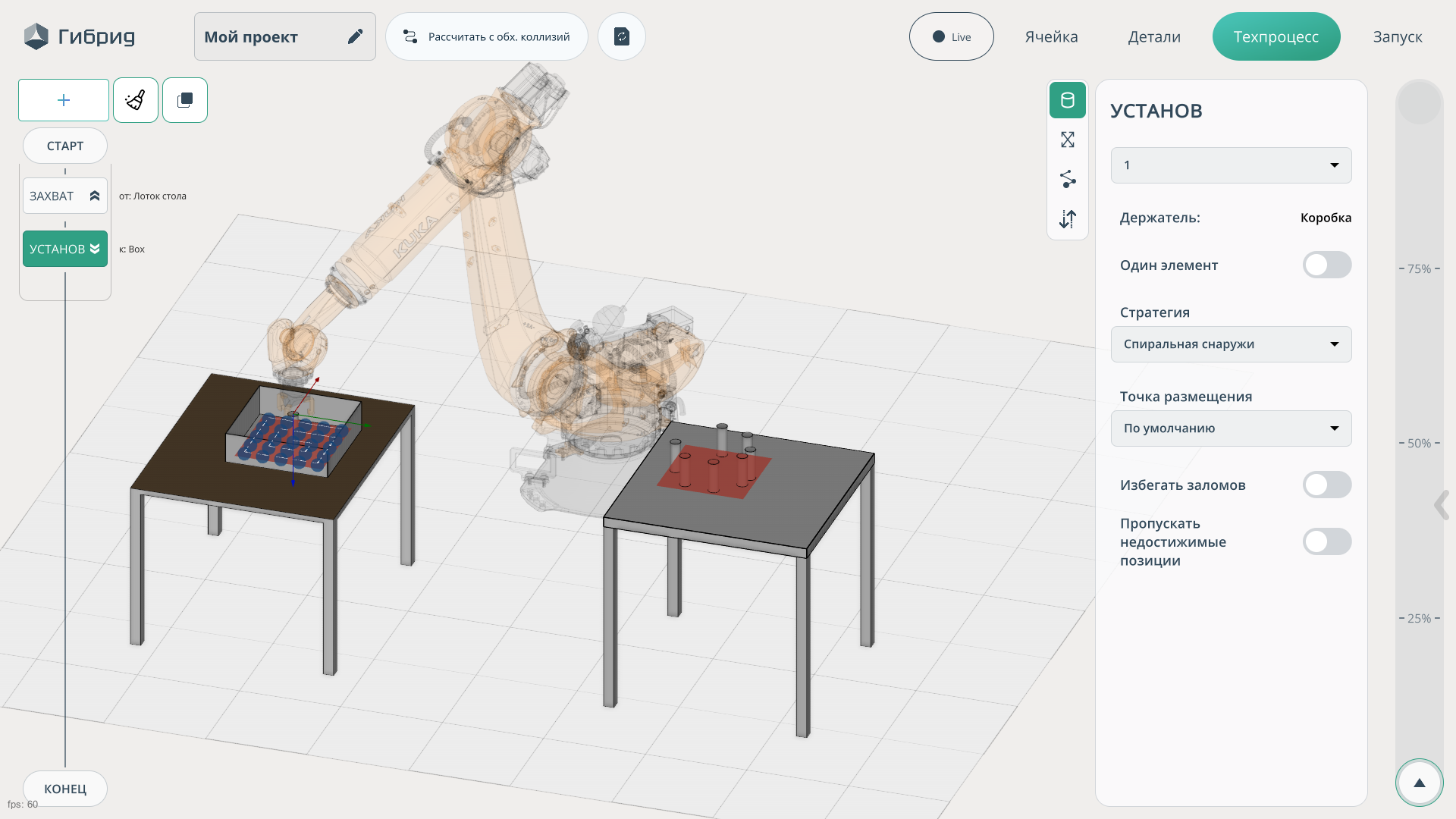
Настройки захвата. Данная вкладка содержит основные настройки захвата.

Список выбора стороны инструмента. Если у вас используется инструмент с захватом на две стороны, то приложение позволяет выбирать их.
Захват / Установ. Положение робота во время захвата / положение робота во время размещения детали.
Один элемент. Параметр который позволяет выбрать одну деталь, либо все детали (Если отключить ползунок).
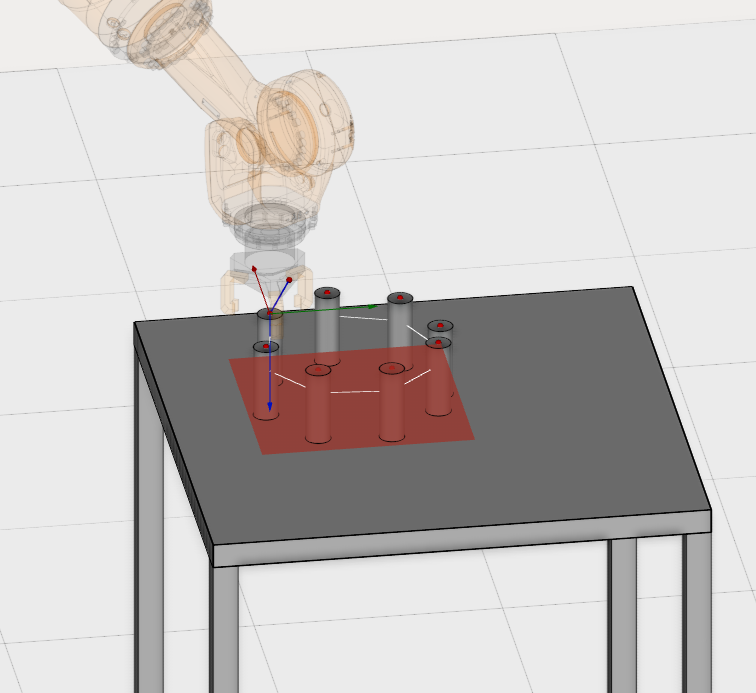
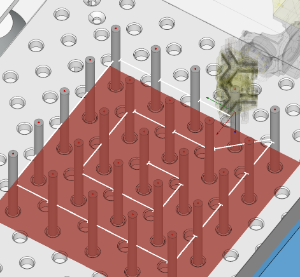
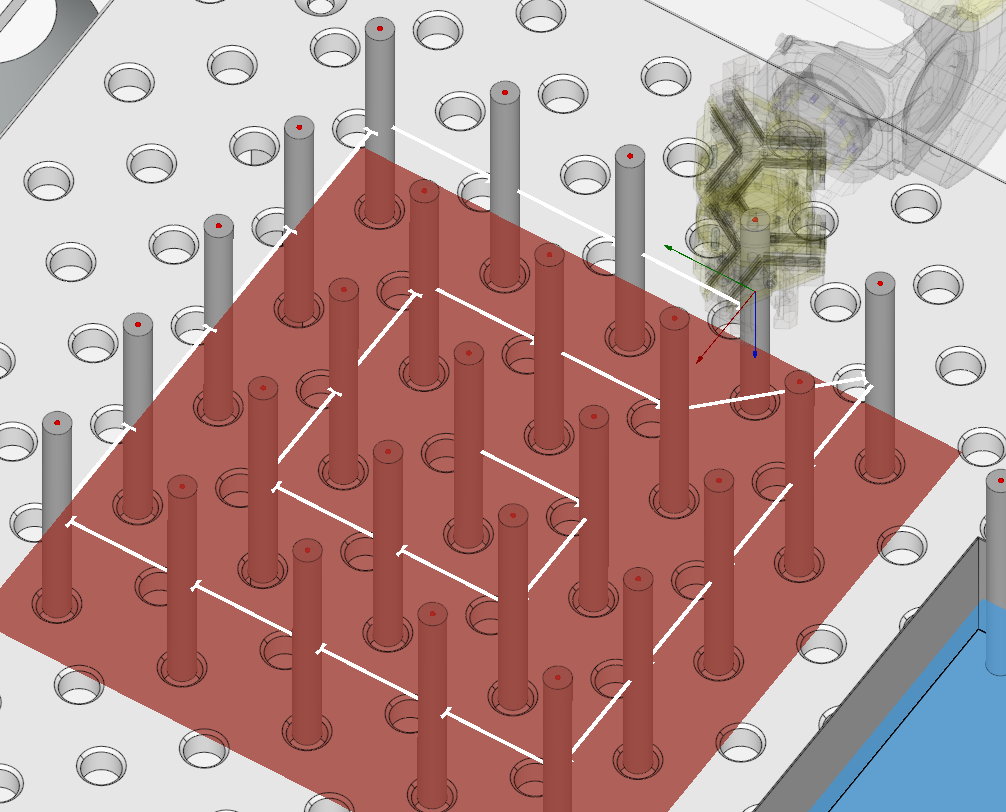
Если выбрать всю ячейку, заранее будет отображён шаблон последовательности переноса деталей из этой ячейки.
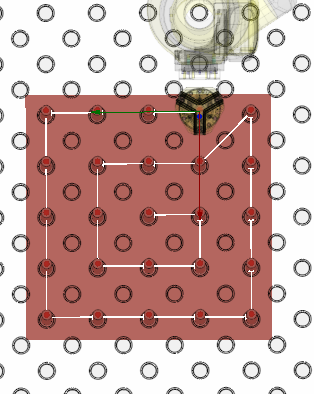
Стратегия. Позволяет выбрать шаблон последовательности переноса деталей из ячейки.
Спиральная снаружи.
Спиральная изнутри.
По строкам.
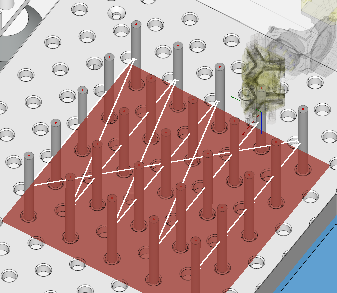
По столбцам.
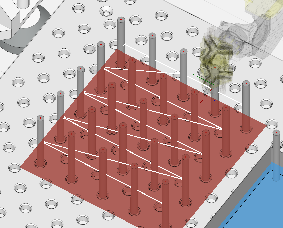
Оптимальная.
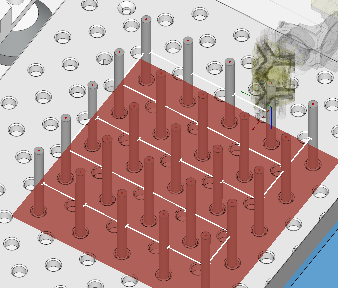
Пользовательская. Ручная настройка порядка захвата и установа деталей.
Предпочтительная заготовка . Если в ячейке находятся разные типы деталей (которые были определены в режиме Детали), данный параметр позволяет указать, какие именно детали необходимо брать.
Точка захвата и точка установа. Список точек захвата. Точки захвата задаются в режиме Детали при описании детали. Их можно редактировать в любое время как в данном режиме, так и в режиме Детали.
Обход столкновений. Предотвращает перекручивание осей (чрезмерное вращение узлов робота).
Пропускать недостижимые позиции. При включении этого параметра робот будет захватывать только те детали, до которых он может дотянуться. Если параметр отключён и робот не может достичь детали, программа выдаст ошибку и будет ожидать действий оператора.
2. Редактор опорных точек. Позволяет редактировать точку захвата детали (например, если требуется захват с зазором). 
Панель управления содержит элементы навигации для перемещения робота в пространстве. Узнать больше
3. Дополнительные точки для обхода коллизий. Позволяет задавать дополнительные точки или стратегии обхода столкновений между точками захвата, установа и безопасного расстояния. 
4. Безопасное расстояние. Позиция, в которую робот перемещается перед захватом детали. 
Простой. Позволяет создавать простой подход к точке захвата.
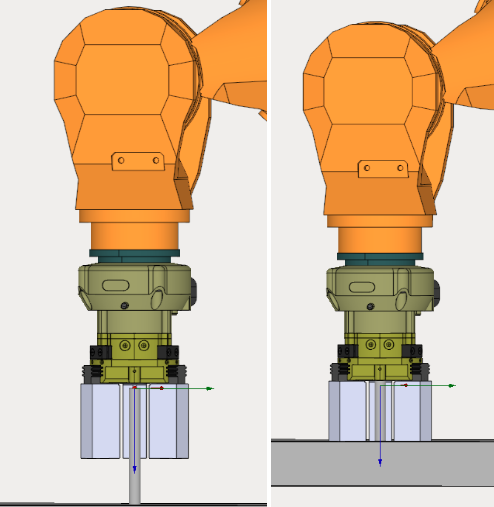
Расстояние безопасного перемещения. Позиция, в которую робот перемещается перед захватом детали.
Направление безопасного перемещения. Позволяет указать ось, вдоль которой выполняется подход к точке захвата (X+, X- и т.д.).
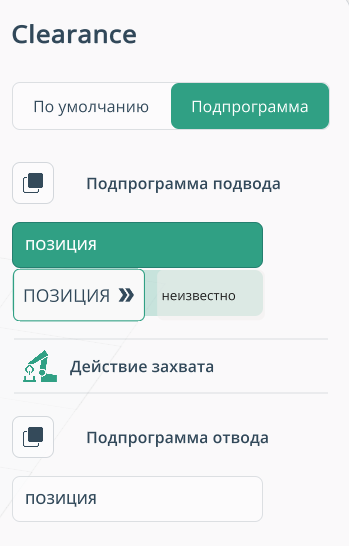
Подпрограмма. Позволяет создавать сложный подход к точке захвата (например, когда робот должен взять деталь со станка, переместиться к станции выдува стружки и затем разместить деталь).
В этом режиме можно создавать подпрограммы, состоящие из нескольких шагов (аналогично структуре программы). Для этого создайте команду с помощью кнопки "Добавить команду" и перетащите её в подпрограмму.
Можно добавлять команды, такие как Позиция или I/O.
Для команд Позиция доступна опция перемещения робота в пространстве. Узнать больше
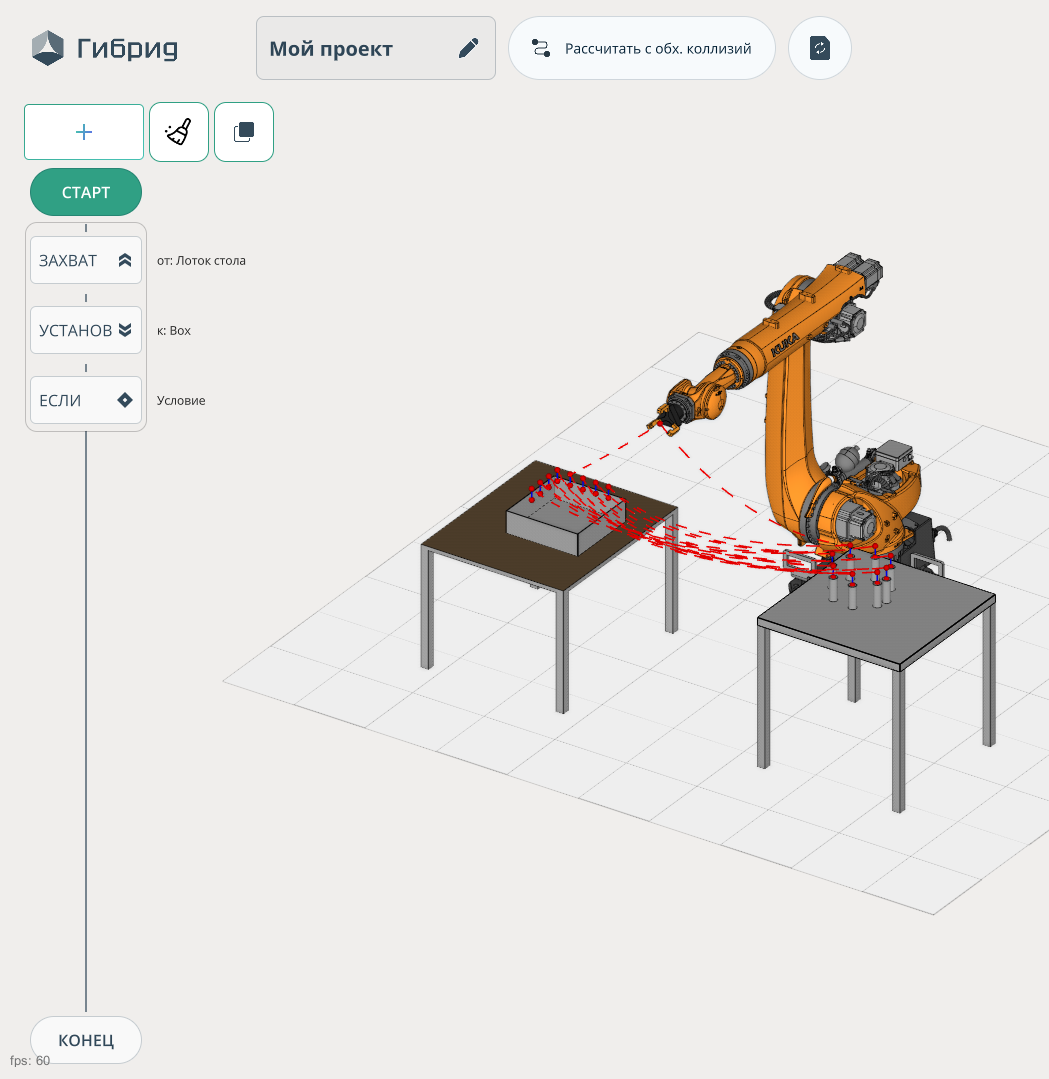
ЕСЛИ. Позволяет задавать разные условия для программы. Например, зациклить выполнение программы.
Принципы работы:
Если в программе отсутствует команда ЕСЛИ, Захват и Установ выполняются только для одной детали.
Если используется команда Если, программа будет зацикливаться. При этом в дереве программы отображается, с какими блоками работает команда Если (все команды помещаются в один блок).
Программа работает блоками. В этом примере есть 3 блока:
Блок 1 — Захват: Проверяет лоток и определяет, есть ли внутри деталь. Затем выполняется захват детали.
Блок 2 — Установ: Проверяет второй лоток и ищет место для размещения детали.
Блок 3 — ЕСЛИ: Проверяет, пуст ли стол, и в зависимости от ответа выполняет действие для Да или Нет.
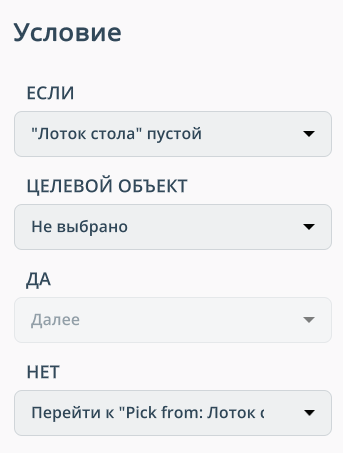
Состоит из:
ЕСЛИ. Основное условие, при котором выполняется цикл. Это может быть, например, условие "Стол пуст" или "Стол обработан".
Целевой объект. Условие применяется только к конкретной детали.
Да. Действие, которое выполняется, если условие истинно.
Нет. Действие, которое выполняется, если условие ложно.
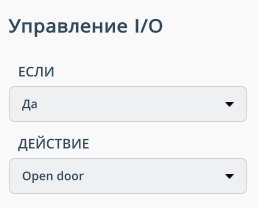
I/O. Используется для управления входами/выходами (внешние оси станков и роботов — двери станков, рельсы и т.д.). I/O настраивается в Настройках проекта. Узнать больше
Принципы работы:
Например, создадим команду "Закрыть двери станка" в настройках.
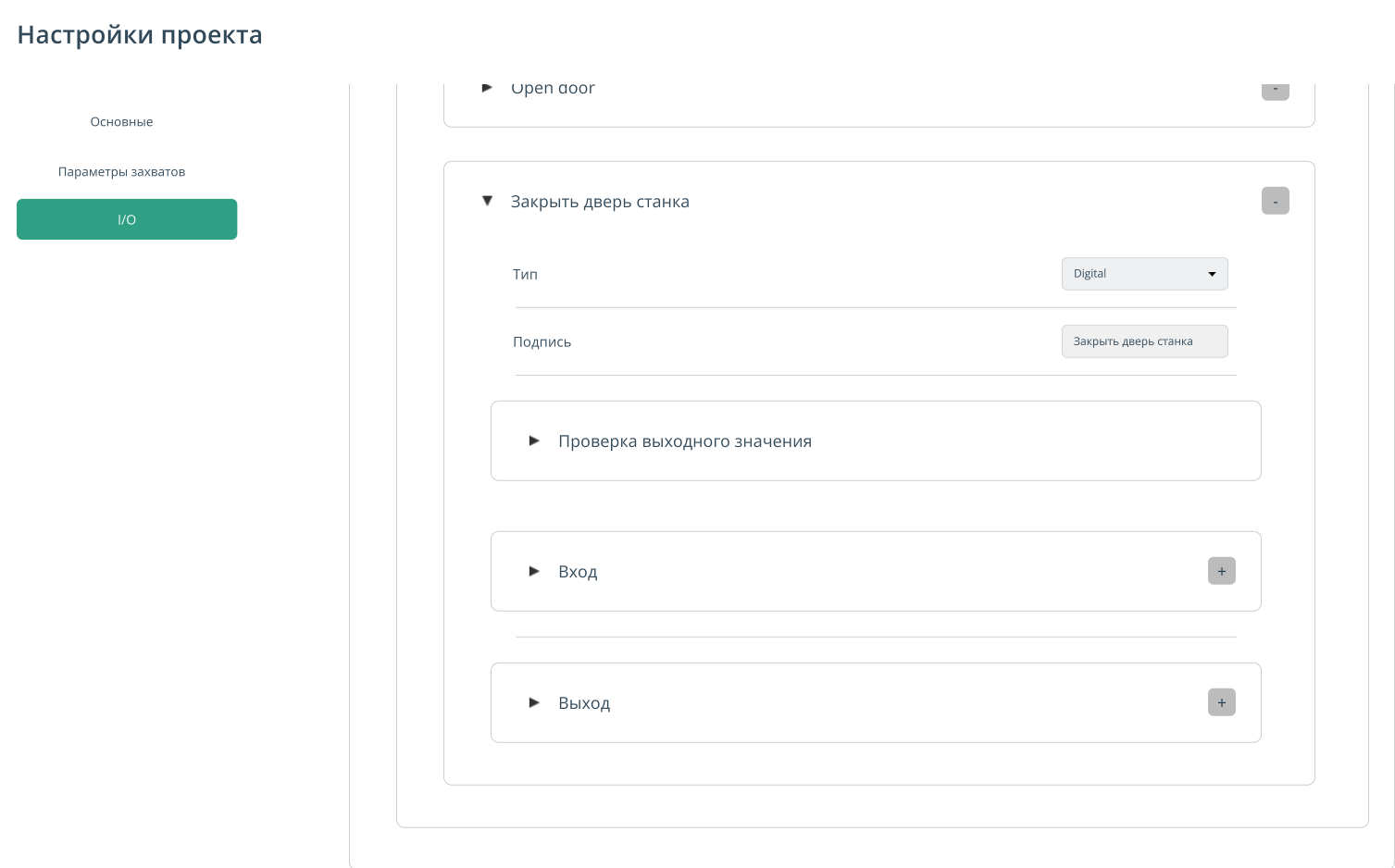
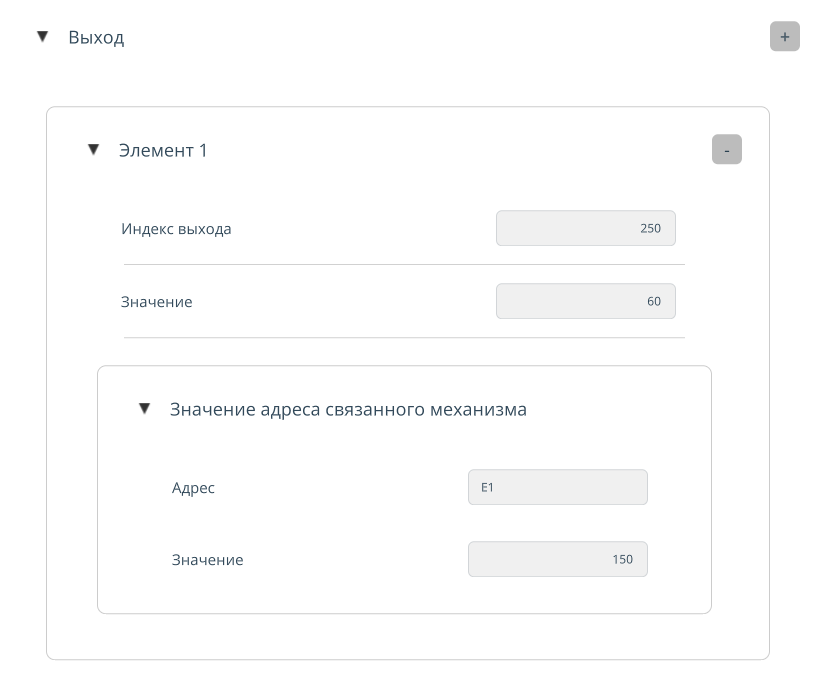
Можно настроить любые входные и выходные сигналы. Например, установим выход 250 в значение 60.
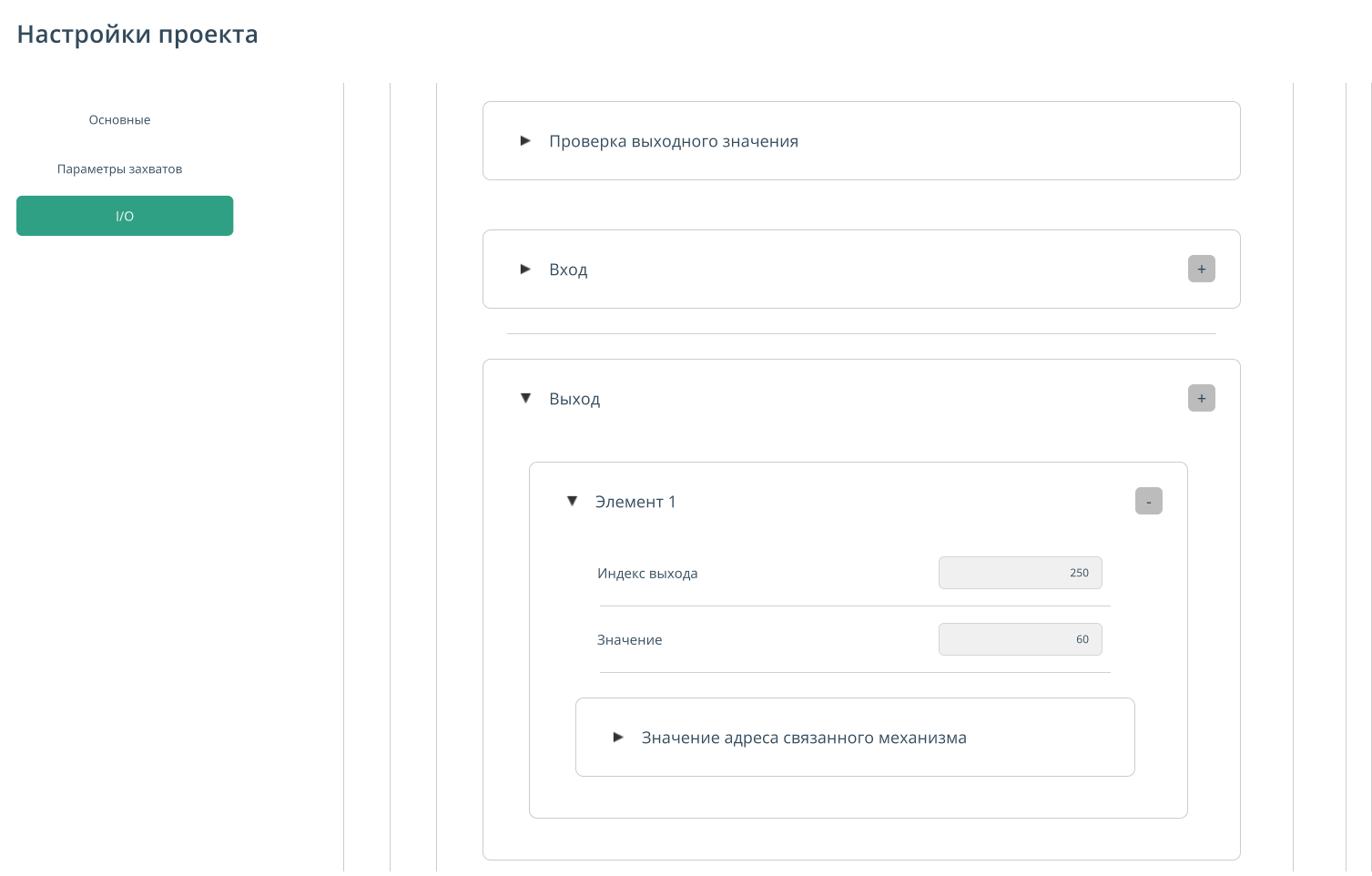
Для визуализации можно считать, что при этом значение ось E1 сместилась на 150 (например, дверь станка).
В окне I/O можно выбрать это действие.
Состоит из:
ЕСЛИ. Позволяет проверять датчик перед выполнением любого действия I/O (например, открыть дверь станка, если датчик показывает, что станок не работает).
По умолчанию действия I/O можно запускать без условий.
ДЕЙСТВИЕ. Позволяет выполнить макро‑событие, которое было настроено в настройках проекта.
Пауза. Позволяет задать задержку между действиями.
Забивание гвоздей. Функционал предназначен для забивания гвоздей.
Принципы работы:
Робот подходит к точке, подаёт сигнал на инструмент, который забивает гвоздь, а затем отключается.
Состоит из:
Действие во время обработки. Позволяет задать I/O событие (для подачи сигнала на инструмент для забивания гвоздей).
Параметры такие же, как в операции Захват.
Траектория. Позволяет импортировать траекторию из СПРУТКАМ (CAM‑системы).
Принципы работы:
Первый способ создания операции ТРАЕКТОРИЯ:
В установленной папке Гибрид есть специализированный постпроцессор (Hybrid\CAMConnectors\Postprocessor\ToolpathConverter.sppx). Его необходимо добавить в Гибрид и сгенерировать управляющую программу для траектории инструмента.
При создании операции Траектории в Гибрид появится диалоговое окно с запросом загрузки файла управляющей программы.
Второй способ создания операции Траектория.
После расчёта траектории в СПРУТКАМ вы можете:
Щёлкнуть правой кнопкой мыши по операции в дереве/списке операций.
В появившемся контекстном меню выбрать пункт экспорт параметров операции.
После этого рядом с файлом проекта (.stcp) появится специальный файл с расширением .mtomap.
Этот файл содержит список параметров для данной операции, которые можно использовать для генерации траектории с помощью API СПРУТКАМ.
Затем необходимо открыть утилиту, расположенную по следующему пути: Hybrid\CAMConnectors\CAMConnectorDotNetMappingFileEditor\CAMConnectorMappingFileEditor.exe
В открывшемся окне можно перетащить файл .mtomap.
В этом окне будут отображены параметры операции из СПРУТКАМ.
Например, можно отметить галочкой, что требуется возможность изменения стратегии операции.