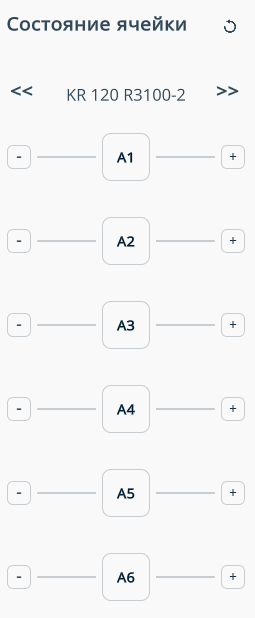
Навигация для перемещения робота в пространстве
Область применения:
Позволяет перемещать робота в пространстве различными способами.
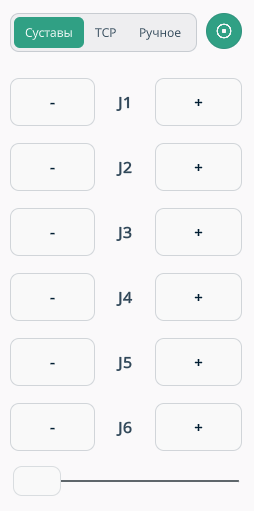
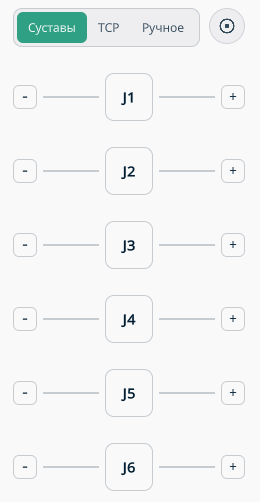
Режим осей. Позволяет перемещать робота, управляя отдельными осями.
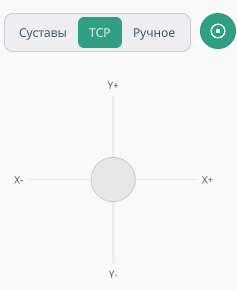
TCP Mode.
Перемещение робота в системе координат точки инструмента (TCP). Удобно для интуитивного позиционирования деталей.
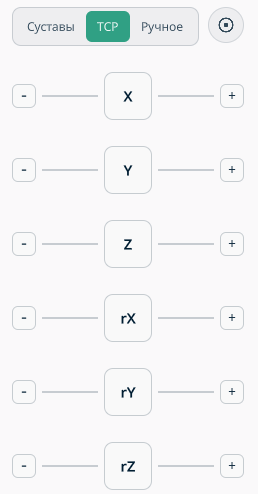
При повторном нажатии кнопки TCP активируется режим перемещения TCP в плоскости XY (оптимизирован для управления джойстиком).
Ручной режим.
Работает только при подключении робота в режиме реального времени. Роботом можно управлять как с пульта дистанционного управления, так и вручную.
Режим высокой точности.
Может быть включён для всех режимов управления. Уменьшает шаг перемещения, чтобы предотвратить столкновение робота с препятствиями. ![]()
Шаг перемещения задаётся с помощью ползунка в нижней части интерфейса.