Обход недостижимых позиций и сингулярностей
Особенностью программирования робота является наличие у него "лишних" степеней свободы. Это обеспечивает бесконечное множество вариантов позиционирования в заданную точку. Способы автоматического выбора подходящей позиции описаны в главах:
Однако иногда этих возможностей бывает недостаточно, и возникает потребность непосредственного указания значения оси для каждой точки траектории. Для реализации этой возможности в системе имеется специальный оптимизатор, окно которого открывается следующей кнопкой.
Примечание : доступно при лицензии на опцию "Робот +".
В окне оптимизатора можно задать закон изменения отдельной оси вдоль всей траектории.
Конфигурация робота
Сначала нужно выбрать конфигурацию/состояние робота, которое будет использоваться в операции. Это та же конфигурация, которую вы можете редактировать в настройках операций в параметре «Карта осей робота». Конфигурация робота определяется «флипами» - альтернативными позициями соединений робота (база, локоть, запястье), которые определяют одинаковое положение инструмента относительно заготовки, - и режимами позиционирования дополнительных осей, таких как рельсы и поворотные столы (движение вверх E1, вращение E2).
Оптимизируемая ось
С помощью вкладок можно переключаться между различными доступными для оптимизации осями робота.
Карта столкновений
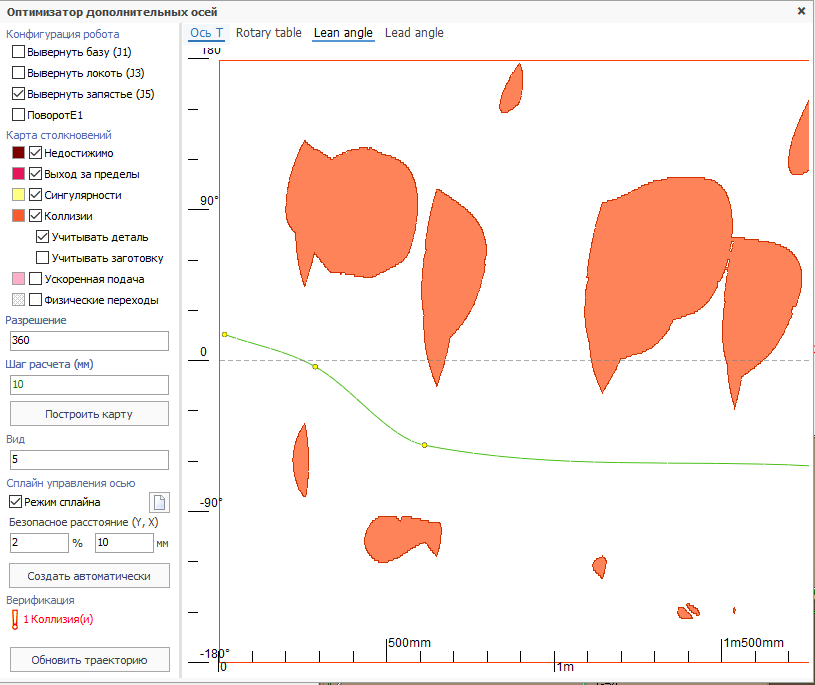
Карта столкновений - это визуальное представление зон столкновений в траектории. Вдоль оси X - положение инструмента на траектории с начала, измеренное по длине. Вдоль оси Y - значение оптимизированной оси. Обнаруживаются следующие типы столкновений .
Недостижимые зоны (бордовые) - это зоны, до которых робот не может дотянуться.
Зоны за пределами осей (фиолетовые) - это зоны, в которые робот может попасть, но некоторые из осей робота выходят за установленные пределы.
Зоны сингулярности (желтые) - это зоны, в которых суставы робота движутся с предельной скоростью.
Зоны столкновения (оранжевые) - это зоны, где детали робота сталкиваются друг с другом или с заготовкой.
Разрешение карты может быть установлено в поле Разрешение как размер шага вдоль оси Y, используемый при построении карты.
Чтобы построить или обновить карту, нажмите кнопку Построить карту.
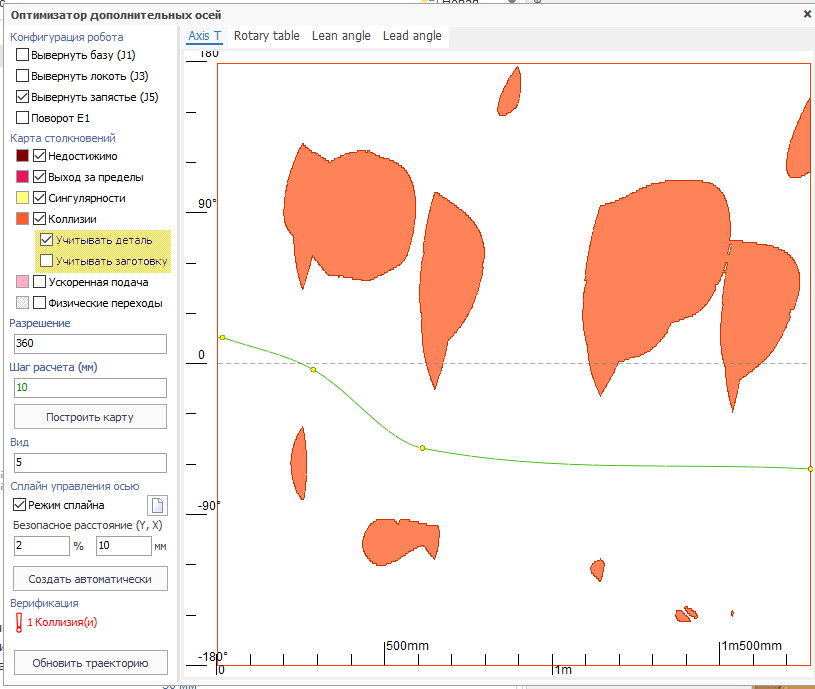
Учет детали и заготовки
Под галочкой "Коллизии" были добавлены 2 галочки для управления учетом заготовки и/или детали при обнаружении столкновений. Они доступны только если была выбрана родительская галочка. Учет заготовки/детали целесообразно переключать в зависимости от типа обработки - резание, аддитивная обработка, либо сварка.
Сплайн траектории оси
Траектория оси определяется кривой в виде сплайна. По умолчанию его нет, что означает, что либо оптимизируемая ось находится в одном и том же состоянии (в ручном режиме) или контролируется автоматически (в автоматическом режиме) на протяжении всей траектории операции (горизонтальная серая пунктирная линия).
Цель состоит в построении наилучшей кривой, проходящей слева направо через зоны, свободные от столкновений.
Для создания нового сплайна кликните 2 раза мышкой на точку в пустой зоне, через которую должен проходить сплайн. Достаточно 2 точек. После создания можно менять форму сплайна с помощью перетаскивания контрольных точек мышью. Для удаления точки нажмите правую кнопку мыши, для добавления новых точек используйте левую кнопку дважды.
Кнопка Очистить удаляет текущий сплайн.
С помощью кнопки Создать автоматически можно сгенерировать сплайн, проходящий через свободные от столкновений зоны.
Верификация
В этой области отображается статус текущей траектории. Если в траектории нет коллизий, отображается текст "Ok" зеленого цвета, если коллизии есть, их количество показывается красным. Статус обновляется каждый раз, когда вы меняете сплайн управления осью.
Одновременно в графическом представлении зоны столкновения в реальной кривой траектории также отмечены областями соответствующего цвета типа столкновения.
Для исправления либо кликните на пустую область карты, либо двигайте сплайн, удерживая левую кнопку мыши, в нужную точку траектории.
Обновить траекторию
Для применения закона управления осью нажмите кнопку Обновить траекторию.
Обнаружение и обход разворотов периодических осей
Карта избыточных осей может быть использована для обнаружения таких проблемных участков траектории, как развороты поворотных (периодических) осей. Разворот происходит, если поворотная ось достигла одного из своих лимитов, и для того, чтобы продолжить обработку, ей требуется совершить один полный оборот (360°) вперед или назад. Ранее эта информация никак не отображалась в карте робота, так как в случае разворота ось тем не менее остается в своих пределах.
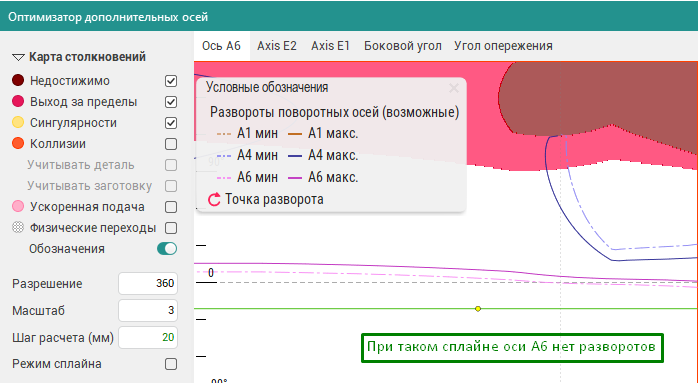
Светлые пунктирные и темные сплошные линии показывают возможные места разворотов в траектории, в случае если сплайн их пересекает. Каждой оси, для которой возможны развороты, соответствует свой цвет линий. Однако, пересечение не всегда означает разворот; реальные места разворота дополнительно выделяются на сплайне как жирные красные точки со знаком "разворот". Также, при наличии разворотов в траектории, их количество отображается на статусной панели "Проверка". Возможны 2 типа разворотов:
разворот происходит после достижения минимума оси (светлые пунктирные линии)
разворот происходит после достижения максимума оси (темные сплошные линии)
Нажмите на переключатель "Обозначения" для просмотра условных обозначений в карте, относящихся к разворотам периодических осей.

Скриншот 1. В траектории операции имеются 2 разворота.
Скриншот 2. Сплайн был перемещен ниже так, чтобы избежать пересечений с линиями возможных разворотов. В результате траектория больше не содержит разворотов.
Если траектория операции содержит развороты, вы можете попытаться избежать их, переместив сплайн так, чтобы он не пересекал данные линии, или пересечения были «ложными» (значение оси вращения еще не достигло своего предела в этой точке, но это значение равно минимуму или максимуму оси "по модулю 360").
На скриншоте выше сплайн был изменен на прямую линию, которая не пересекает ни одну из синих/фиолетовых линий, что позволило избавиться от разворотов в траектории. Изменение конфигурации робота (параметры «Вывернуть локоть», «Вывернуть запястье») также может помочь избежать разворотов.
Управление произвольной осью станка
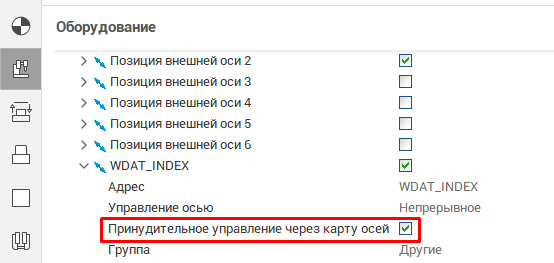
При необходимости контролировать изменение в траектории произвольного параметра (определяемого как ось в схеме станка), вы можете включить флаг "Принудительное управление через карту осей" в соответствующем параметре состояния станка.
Флаг доступен для каждого параметра состояния станка в разделе инспектора "Оборудование → Параметры состояния станка». После этого ось появится в окне карты осей, и, как обычно, вы можете определить значение параметра в каждой точке траектории с помощью сплайна.
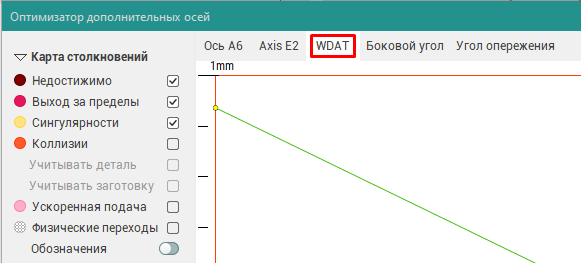
Также можно установить этот флаг непосредственно в xml-файле станка в разделе типа "TMachineStateParameter", который соответствует данной оси.
<SCType ID="WDATPOS" Caption="WDAT_INDEX" type="TMachineStateParameter"> ... <ControlWithMap DefaultValue="True"/></SCType>Обход сингулярностей для робота с 2-осевым поворотным столом
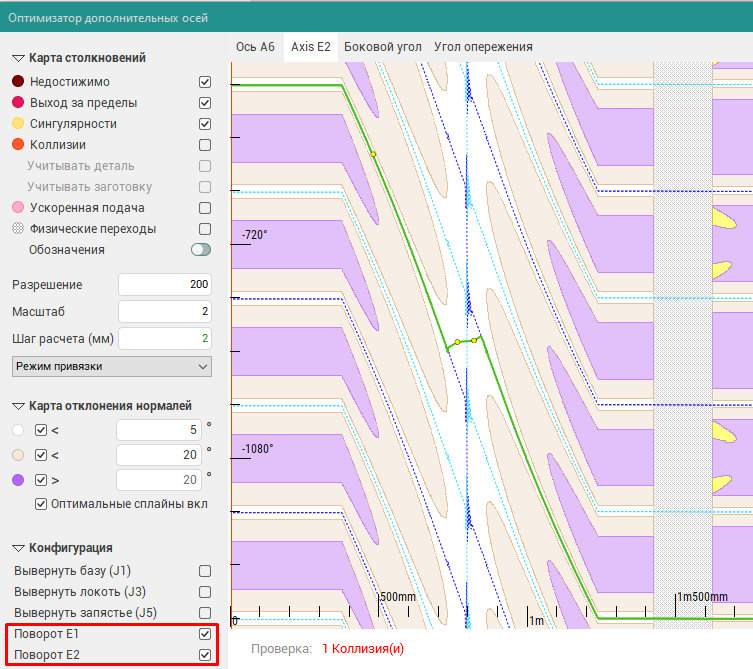
Ранее, при обработке роботом с 2-осевым поворотным столом, для которого были включены оба "флипа" поворотного стола (обычно имеющие название «Поворот E1» и «Поворот E2»), результирующая траектория могла проходить через зоны сингулярности с очень резкими изменениями положения поворотного стола. Поэтому в карте осей в данном случае включается специальный режим, аналогичный Карте осей для 5-осевых станков. В этом режиме достаточно определить траекторию только для одной из осей поворотного стола, значение для другой будет вычисляться автоматически, чтобы минимизировать отклонение от нормали инструмента в каждой точке траектории. Этот позволяет получить более плавную траекторию осей поворотного стола за счет возможных небольших отклонений от нормали инструмента (обычно в пределах 1°).
В белых зонах отклонение от оси (при фиксированном значении редактируемой оси) минимально, поэтому оптимальный сплайн должен по возможности находиться именно в белой зоне. С помощью сплайна можно задать близкую к оптимальной траекторию оси (E2 на скришоте) без резких изменений.
Сопутствующие ссылки:
Карта осей для 5-осевых станков