Дополнительные параметры
Контроллер робота может использовать внешние оси, и для этих осей необходимо назначить правильные позиции (индексы) в сборке. По умолчанию постпроцессоры CAM системы используют идентификаторы осей на основе индексов (ExtAxis1Pos для первой оси, ExtAxis2Pos и т. д.). Некоторые пользовательские постпроцессоры могут использовать адреса осей вместо индексов (E1, E2, E3, J4 и т. д.).
Нажмите кнопку ![]() чтобы открыть панель параметров сборки.
чтобы открыть панель параметров сборки.
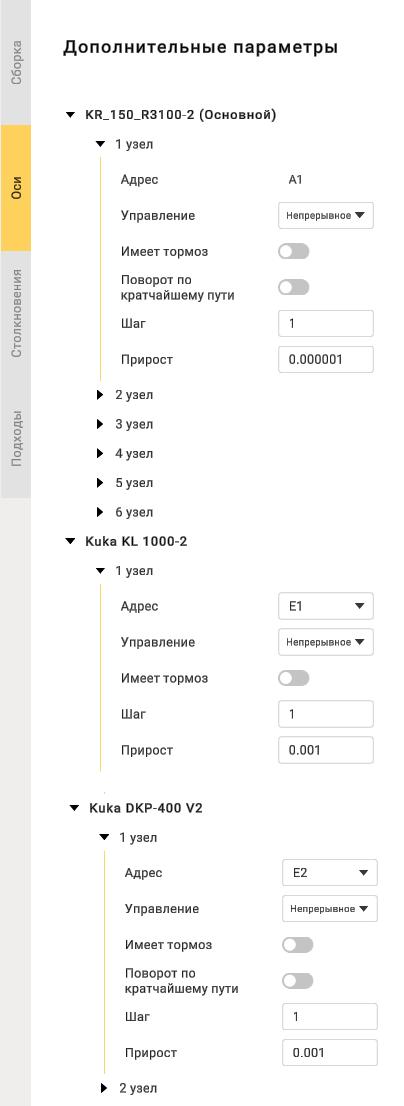
Адрес - обозначение оси.
Управление:
Непрерывное.
Индексированный - означает, что вращение будет выполняться пошагово.
Вручную - означает, что операция выполняется полностью вручную.
Поворот по кратчайшему пути - означает вращение вокруг оси или точки с использованием наиболее прямого пути между начальным и конечным положениями в трехмерном пространстве.
Шаг - параметр с четырьмя положениями. Каждое положение соответствует определенному угловому приращению. Позиция 1 равна 90 градусам, позиция 2 равна 180 градусам и так далее.
Определите здесь адрес и позиция (индекс) внешней оси. MachineMaker покажет идентификатор оси (например, ExtAxis1Pos) во всплывающей подсказке. Вы можете использовать его в постпроцессоре.
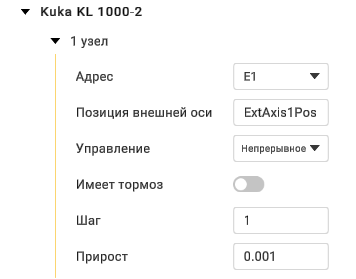
Адрес оси и индекс оси должны быть уникальными в контексте сборки. Если вы попытаетесь задать значение, которое уже было использовано, MachineMaker предложит заменить существующее.
Невозможно изменить адрес и индекс оси робота. Можно изменить только внешние адреса.
Здесь также можно задать дополнительные параметры осей: Управления (Непрерывное, Индексированное, Ручное), Тормоза и Режим поворота по кратчайшему пути.