Композитные инструменты
Композитные инструменты обычно содержат подвижные части, такие как пальцы захвата.
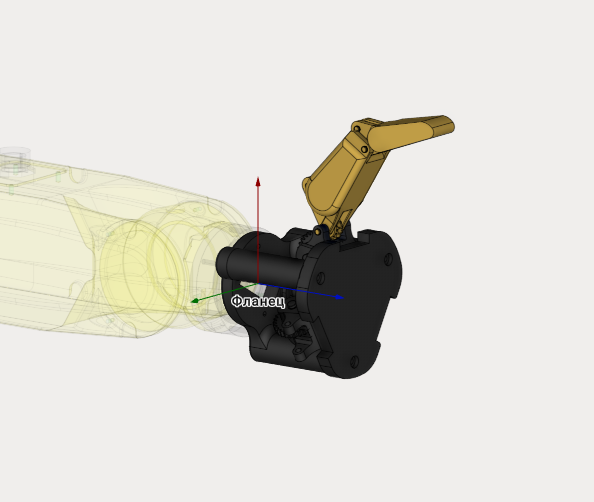
Прежде всего необходимо соединить инструмент с фланцем робота. Самый простой способ - использовать режим редактирования Базовой СК.
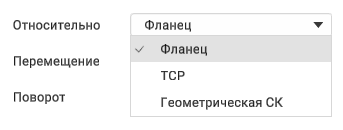
Можно выставить относительно чего будет выставлена система координат для панели трансформации. Используйте по умолчанию для геометрической СК, фланец для фланца робота и TCP для центральной точки инструмента.
После этого нужно перейти к маркировке элементов в узлы.
На этом этапе нам нужно закрасить только один подвижный палец инструмента. Позже MachineMaker автоматически добавит все необходимые пальцы.
TCP
На вкладке калибровки нужно выставить точку TCP.
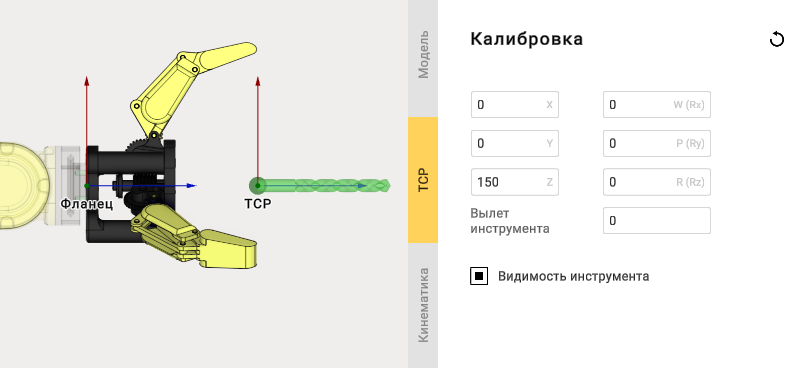
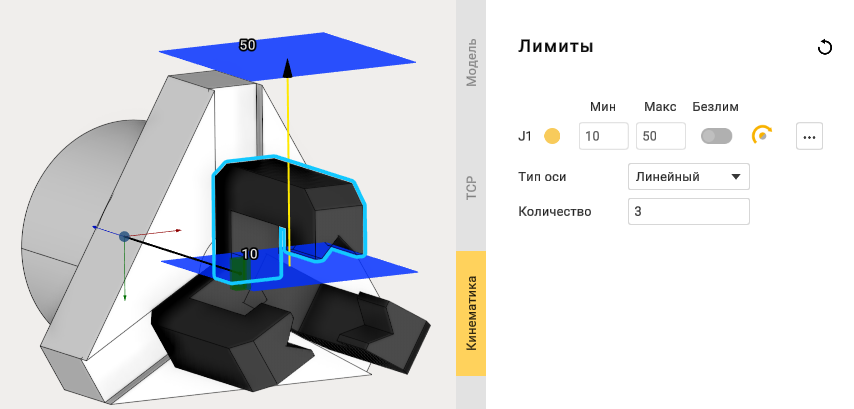
Далее перейдите на вкладку "Кинематика". Прежде всего необходимо выбрать тип оси, он может быть линейным или поворотным.
Для создания копий подвижного пальца используйте функцию "Количество".
Инструмент с подвижными пальцами по линейной оси
Настройка данного инструмента происходит аналогично предыдущему. Разница только в том, что на вкладке кинематика нужно выставить линейный тип. Также изменить минимальные и максимальные значения движения пальцев.