Построение кинематической схемы
Для того чтобы перейти на вкладку "Кинематика" нужно использовать основное меню справа.
![]()
Кинематика
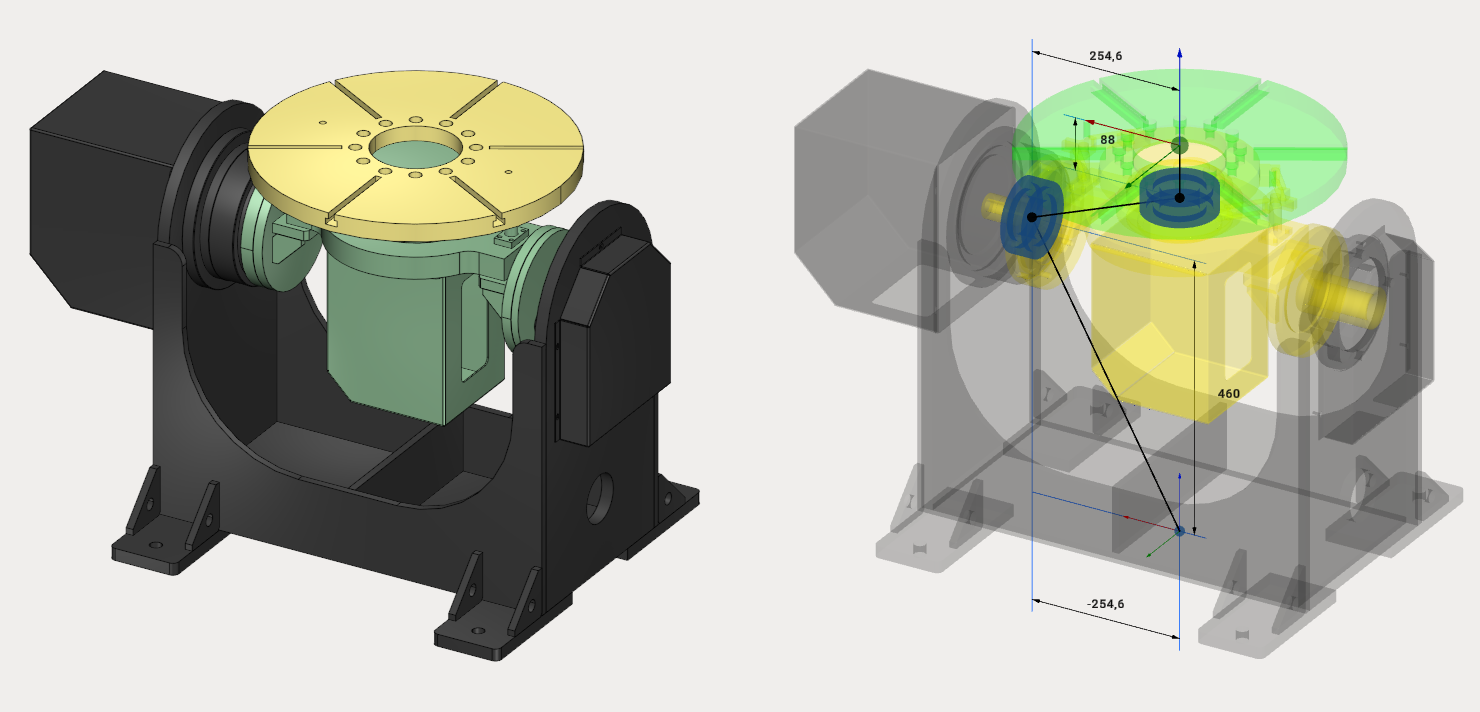
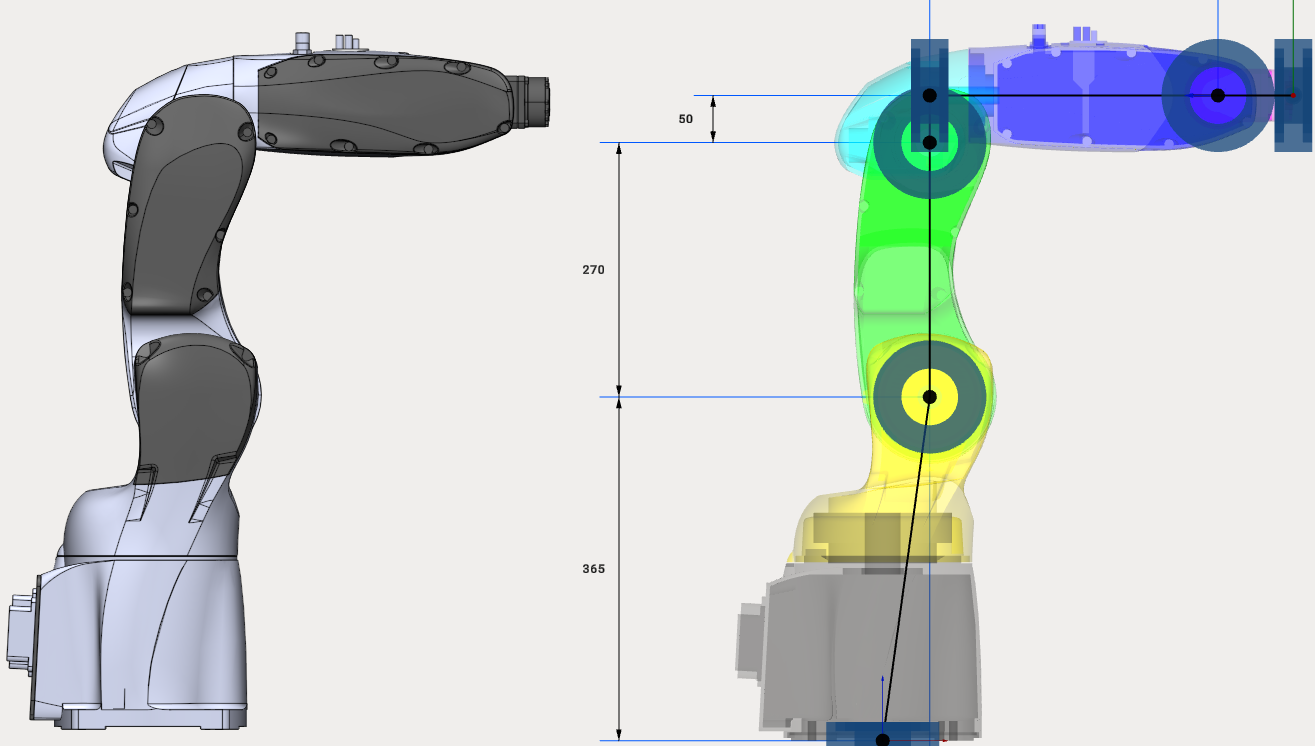
В данной вкладке MachineMaker показывает текущую 3D-модель механизма и его кинематическую схему. Для каждого механизма будут свои данные постройки кинематической схемы.
Существует три способа указать положение соединителя:
Задать значения вручную;
Используя панель преобразования;
С помощью перетаскивания точек и привязки.
Размеры
Чтобы задать значения размеров вручную необходимо левой кнопкой мышии нажать на эти значения в графическом окне, после чего будет доступно редактирование.
Точки перетаскивания и привязки
Удерживая левую клавишу Ctrl вы перейдёте в режим перетаскивания. Здесь можно перетаскивать нужный вам соединитель (Синюю опору для поворотных соединений и синюю точку). При приближении в необходимую область Machine Maker покажет маленькие красные точки привязки. Отпустите кнопку мыши, чтобы оставить соединитель с нужном положении.
Панель преобразования
Также можно изменить положение любого соединителя узлов с помощью ручного перемещения, либо через панель преобразования.
Используйте колесико прокрутки мыши, чтобы изменить значения в любом поле ввода или выпадающем списке. Удерживайте клавиши Shift или Ctrl при прокрутке значений, чтобы изменять их быстрее или медленнее.
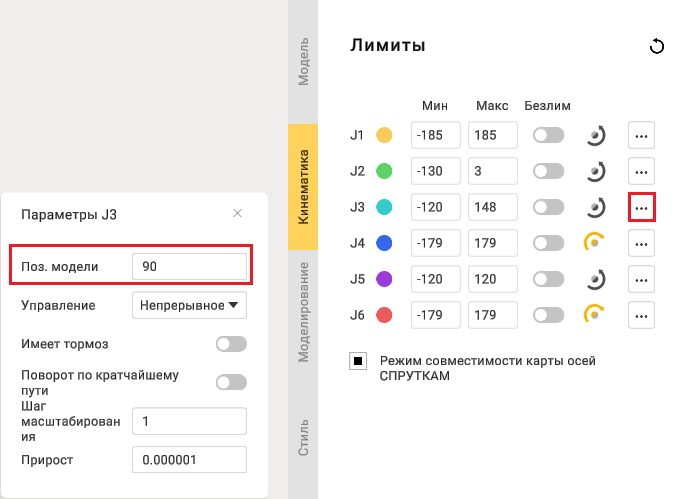
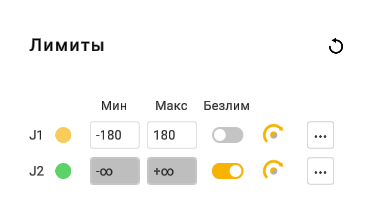
Лимиты
Можно ввести ограничения поворотов для каждого узла. Вы можете найти эту информацию в технических характеристиках своего механизма.
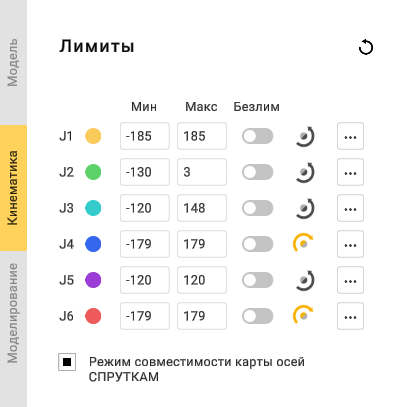
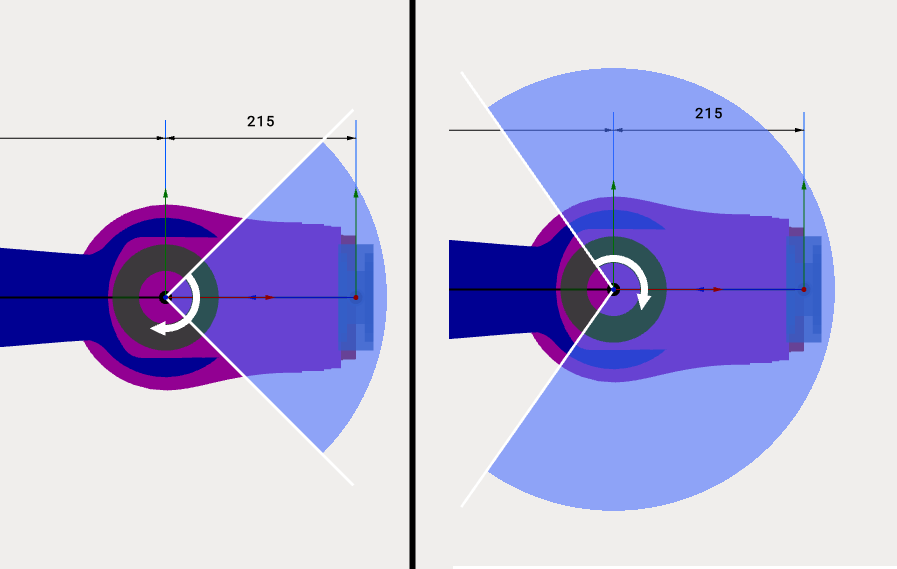
MachineMaker покажет визуально минимальное и максимальное значения угла поворота.
Используйте ![]() или
или ![]() кнопки для изменения направления перемещения.
кнопки для изменения направления перемещения.
Используйте переключатель Безлим для того чтобы например разрешить неограниченное вращение позиционеров.
Положение модели
Используйте позицию модели, чтобы задать значения соединения для текущего положения импортированной 3D-модели.
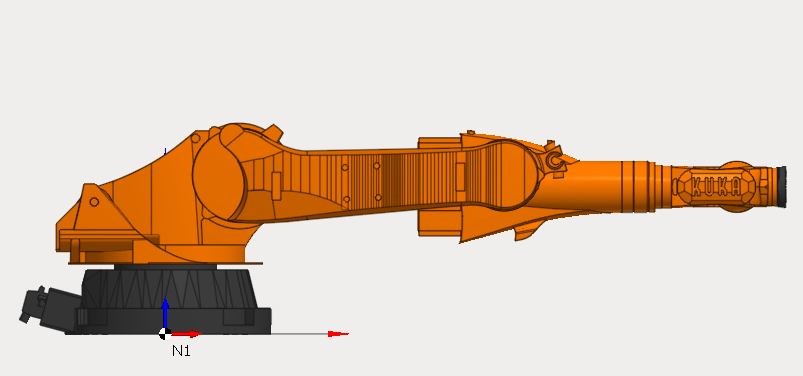
Например, вот нулевое положение роботов Kuka:
Некоторые производители предоставляет 3D-модели с ненулевым положением робота:
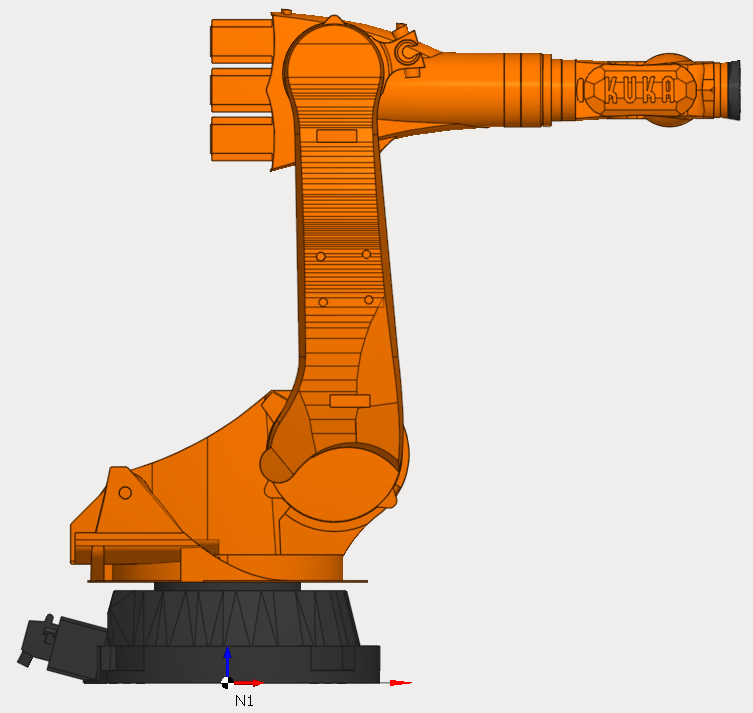
В случае чего эти параметры можно редактировать в настройках оси.