Промышленные роботы
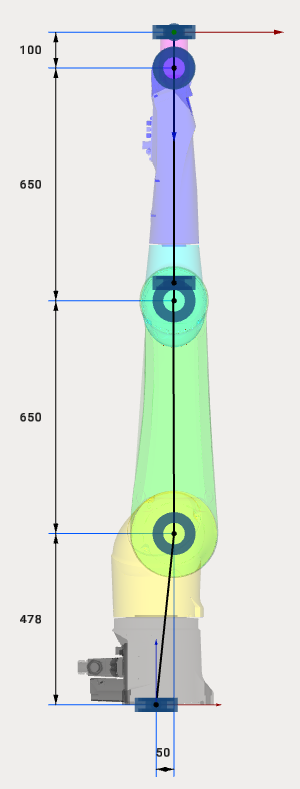
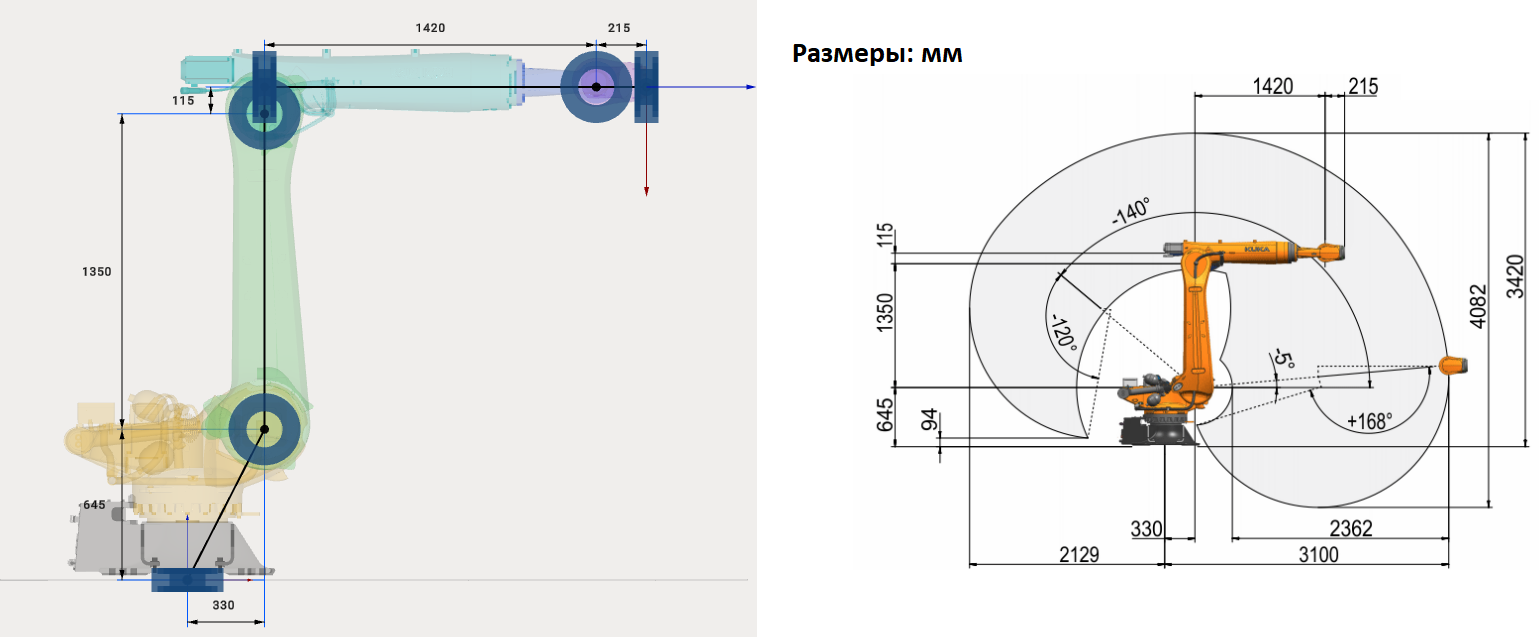
Самый простой способ задать кинематику 6-осевого промышленного робота - использовать его техническую документацию и указать их в MachineMaker.
Режим перетаскивания ограничен для кинематики роботов, чтобы не нарушить кинематическую схему.
Особые случаи
Некоторые производители роботов предоставляют 3D-модели и техническую документацию с роботами, установленными в нулевое положение. MachineMaker автоматически принимает кинематическую связь выбранного типа робота.