Отправка сборок из CAM-системы
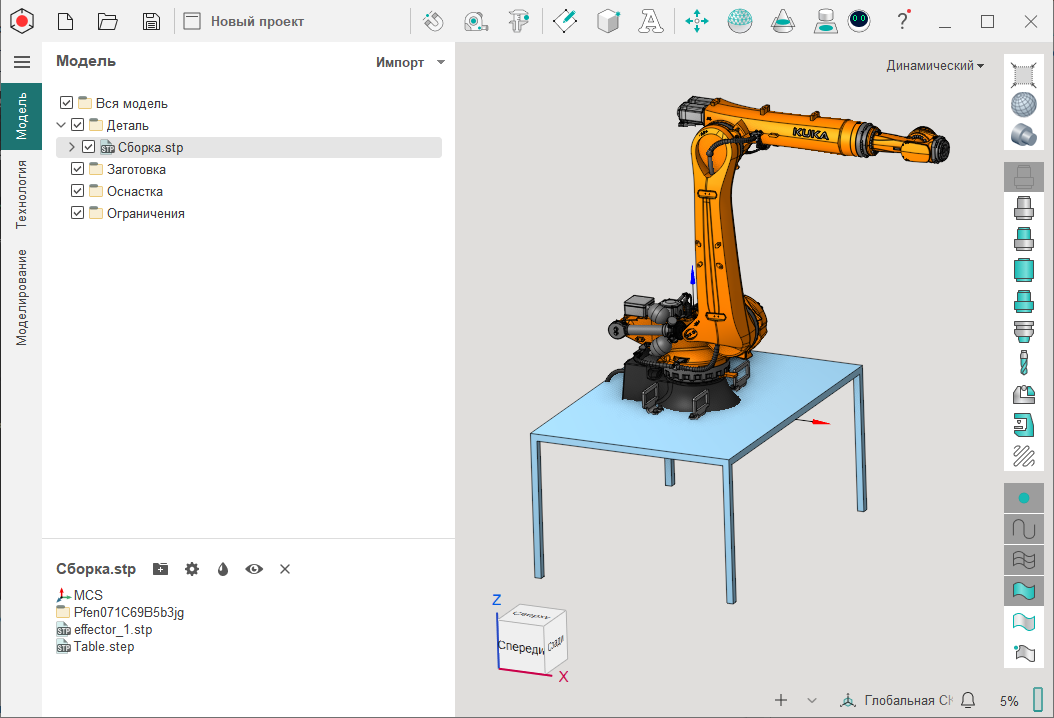
Ячейка может быть предоставлена в виде целой 3D-модели. Из нее необходимо извлечь геометрию каждого механизма в отдельности и загрузить их в MachineMaker. Чтобы упростить эту операцию, можно использовать CAM-систему.
Рассмотрим процесс переноса сборки на примере создания роботизированной ячейки.
В данном случае сборка будет состоять из 3 механизмов:
Робот;
Стол;
Инструмент.
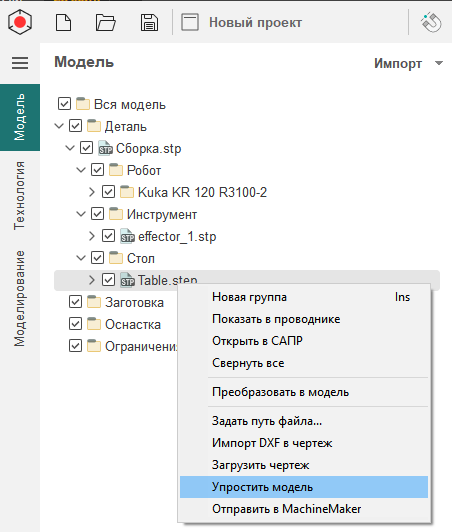
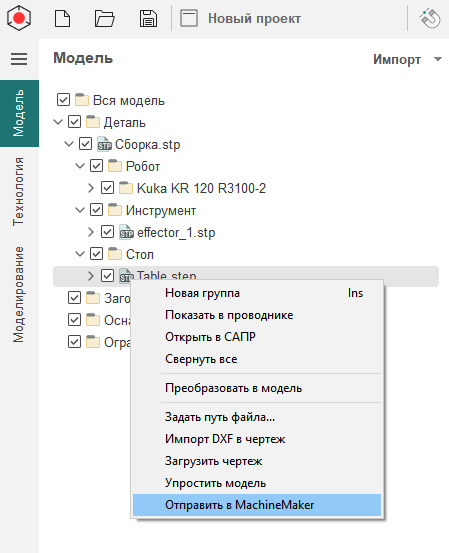
Сначала нужно разделить 3D-модель на части. Создадим группы и перенесем туда файлы, принадлежащие этим механизмам.
Упрощение модели
Геометрия некоторых механизмов может быть излишне детализирована, что влияет на размер файла, скорость загрузки и рендеринга. Для решения этой проблемы можно воспользоваться инструментом упрощения. Под упрощением мы понимаем удаление (с определенным допуском) мелких граней или граней, расположенных внутри модели.
Функцию можно вызвать через контекстное меню командой "Упроситить модель".
В этом окне можно задать параметры упрощения, выбрав один из готовых вариантов или задав их вручную.
Размер элемента - задает максимальный размер исключаемых поверхностей.
Размер поверхности - задает максимальный размер исключаемых поверхностей.
Площадь поверхности - задает минимальную площадь внутренней поверхности, в которой поверхность будет исключена.
Отправка в MachineMaker
На этом этапе рассмотрим как отправлять механизмы в MachineMaker.
Для этого вызовите контекстное меню на выбранном механизме и выберите пункт "Отправить в MachineMaker".
Появится окно в котором можно задать и отредактировать базовую систему координат, относительно которой будет располагаться механизм, и дополнительные системы координат, используемые для позиционирования разъемов механизма.
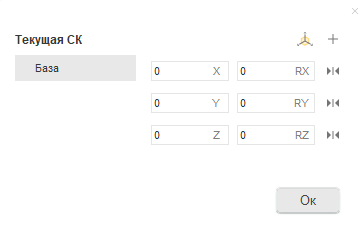
Кнопка
 - добавляет базовые системы координат соседних механизмов. При наведении на них курсором мыши будут показаны силуэты связанных с ними механизмов.
- добавляет базовые системы координат соседних механизмов. При наведении на них курсором мыши будут показаны силуэты связанных с ними механизмов.Oк - отправляет 3D-модель с заданными настройками в MachineMaker.
При загрузке модели в MachineMaker появивится окно "Импорт геометрии механизма". В нём выберите тип механизма из выпадающего списка.
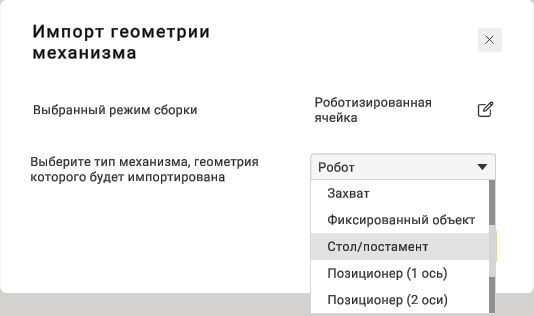
После нажатия кнопки "Применить" механизм будет добавлен в MachineMaker и вы сможете приступить к сборке ячеек.
Давайте начнем с механизма "Робот".
Робот
Зададим базовую систему координат "Базовая СК" - это будет точка соединения механизма на полу. Затем дополнительную систему координат на фланце робота, к которой будет прикреплен следующий механизм, то есть инструмент.
Инструмент
Работа с инструментом очень похожа на описанную выше. Базовая система координат задает точку крепления к фланцу робота, а дополнительная система координат - точку крепления инструмента. После отправки в MachineMaker необходимо выбрать тип загружаемого механизма - инструмент. Если системы координат верны, то инструмент автоматически соединится с фланцем робота. В любом случае можно вручную скорректировать соединение.
Стол
Базовая система координат стола отвечает за расположение на полу, а дополнительные системы координат используются для размещения других механизмов. Вы можете расположить любое количество дополнительных точек соединений на поверхности стола.