Инструменты и калибровка TCP
У робота может быть статичный или композитный инструмент. Более подробную информацию о композитных инструментах можно найти на странице "Композитные инструменты".
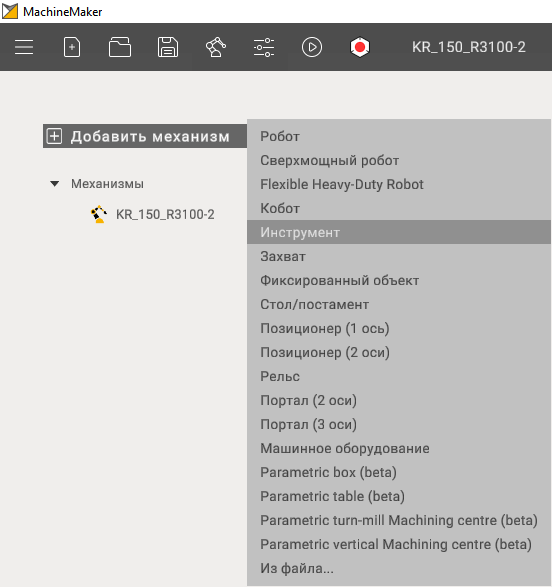
Для того чтобы добавить инструмент нужно нажать кнпоку "Добавить механизм" и в списке выбрать нужный вам инструмент. Затем выбрать файлы инструмента. Важно понимать, что если не иметь при этом в схеме хотя бы 1 робота, у вас не получится добавить инструмент.
3Д Модель
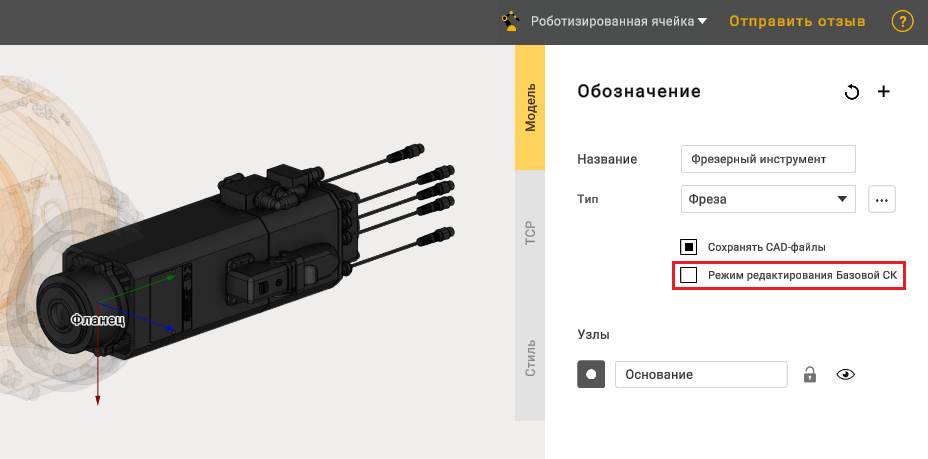
После добавления инструмента MachineMaker показывает прозрачного робота и импортированную CAD-модель инструмента. Маркировка статичного инструмента состоит из одного базового цвета. Чтобы поместить инструмент на фланец робота можно использовать функции:
Используйте панель трансформации в правом нижнем углу;
Включите режим "Режим редактирования Базовой СК" и удерживая левую клавишу Ctrl и укажите точку соединения фланца робота на инструменте с помощью перетаскивания.
Калибровка центральной точки инструмента
Перейдите на вкладку TCP, чтобы открыть панель центральной точки инструмента. Это необходимо для установки инструмента в правильное положение.
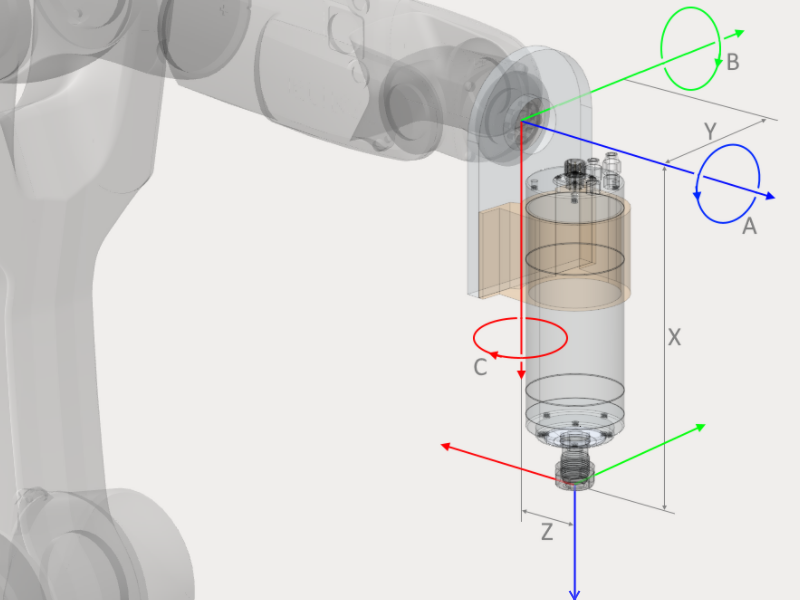
Вы можете использовать панель трансформации или удерживать левую клавишу Ctrl, чтобы перейти в режим перетаскивания. Установите флажок "Видимость инструмента", для более комфортной работы с инструментом. Функция "Перемещение 3Д-модели вместе с TCP" означает что последующие перемещения TCP с этой функцией будут также перемещать полностью и весь инструмент.
Чтобы избежать визуальных расхождений с реальным роботом, рекомендуется перемещать TCP в сочетании с 3D-моделью инструмента после получения реальных калибровочных чисел. После этого калибровка ПТС выполняется на реальном роботе для получения реальных значений.
Также можно задать вылет инструмента, если у вас есть калибровочные значения кончика инструмента полученные от робота.
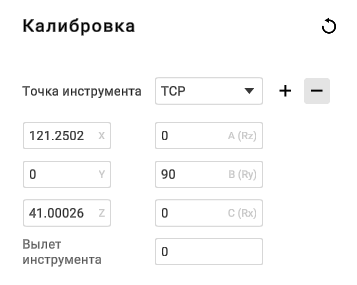
Можно установить нулевое значение вылета инструмента и откалибровать базовую точку инструмента. Или можно задать вылет инструмента и откалибровать кончик инструмента. В CAM-системе и MachineMaker доступны оба варианта.
Использование приложения для калибровки
Приложение для калибровки MachineMaker позволяет выполнить наиболее точную калибровку TCP с помощью метода калибровки по 2 точкам.

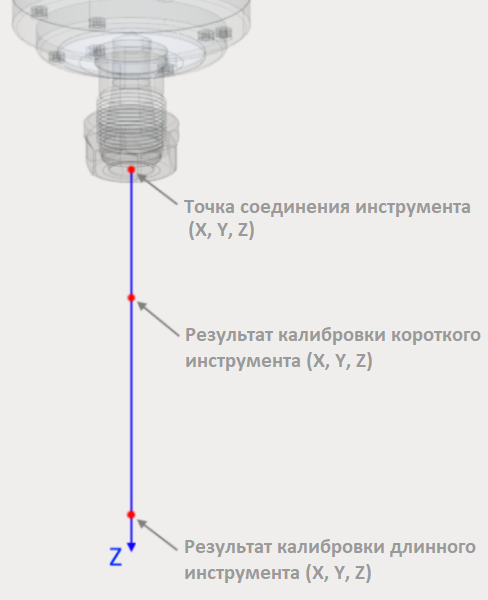
Прежде всего, необходимо откалибровать как длинные, так и короткие инструменты, используя стандартный метод калибровки вашего робота по 4 точкам.

Затем загрузите последнюю версию нашего мобильного приложения, используя ссылку в MachineMaker.
Запустите мобильное приложение и введите значения калибровки, полученные от робота.
Нажмите кнопку "Отправить" и отсканируйте QR-код с MachineMaker. Рассчитанные значения будут автоматически переданы в поля ввода калибровки TCP вашего MachineMaker. Также можно ввести рассчитанные значения калибровки вручную.
Кватернионы, радианы и углы Эйлера
Некоторые роботы (например, ABB) используют кватернионы или радианы вместо углов Эйлера. Для таких роботов MachineMaker будет показывать поля кватернионов. Вы можете переключиться на углы Эйлера, если предпочитаете использовать углы Эйлера.
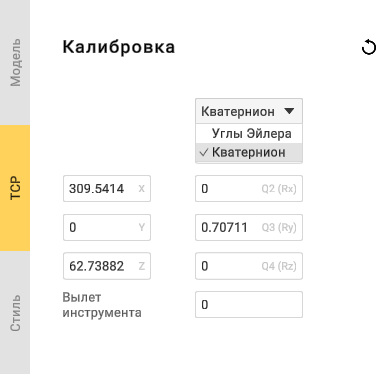
MachineMaker в любом случае сохранит значения TCP в приемлемом для робота формате. Таким образом, даже если вы используете углы Эйлера и задаете положение инструмента в значениях A B C, MachineMaker автоматически преобразует их в кватернионы.