Способы обработки в управляемых операциях
В управляемых операциях вид траектории инструмента в плане задается направляющей областью, которая формируется из указанных направляющих кривых. Координата Z вычисляется исходя из условия касания инструментом обрабатываемой модели.
Проекции рабочих ходов инструмента на горизонтальную плоскость обязательно находятся внутри направляющей области. Способ формирования этих проекций может быть задан одним из следующих способов:
<По границам направляющей области> – производится только один проход вдоль границ области. То есть, производится обработка детали таким образом, чтобы ось инструмента всегда находилась на одной из кривых, ограничивающих направляющую область.
<Вдоль границ направляющей области> – первый проход осуществляется по границам области, а все последующие – по эквидистантам в горизонтальной плоскости к предыдущему запросу. Другими словами, при построении рабочих ходов ось инструмента проходит по семейству кривых, эквидистантных к границам области. Шаг между соседними эквидистантами равен установленному шагу обработки.
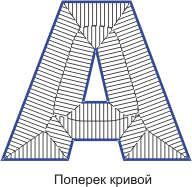
<Поперек границ направляющей области> – горизонтальная проекция каждой строчки представляет собой отрезок, начинающийся на границе направляющей области, перпендикулярный ей в этой точке. Длина этого отрезка выбирается такой, чтобы один и тот же участок не обрабатывался дважды, а направление ходов в каждой точке внутри области задавалось ближайшей к ней точкой на границе.
Количество эквидистантных ходов при способе обработки вдоль границ направляющей области и длина ходов при обработке поперек границ, в общем случае ограничиваются формой и размерами направляющей области. Рабочие ходы строятся до тех пор, пока вся деталь, входящая в направляющую область не будет обработана.
Если включить режим обработки полосы указанной ширины, то обрабатываться заданным способом (вдоль или поперек) будет только полоса вдоль границ направляющей области. То есть, количество эквидистантных или длина прямолинейных ходов будут дополнительно ограничены шириной обрабатываемой полосы.
Вид траектории в плане при различных комбинациях параметров:




Способ обработки для управляемых операций задается в окне задания параметров операции на странице < Стратегии>.