Добавление механизма
Прежде всего необходимо добавить определённый механизм в проект с помощью кнопки "Добавить механизм"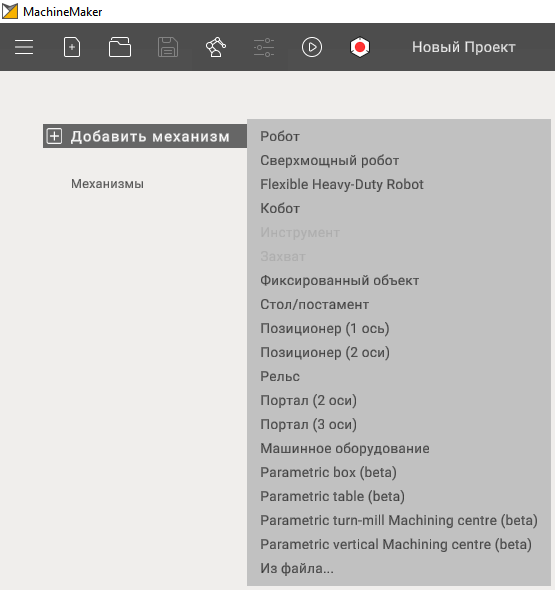
Поддерживаемые типы механизмов
Робот - Обычный промышленный 6-осевой роботизированный манипулятор.
Сверхмощный робот - Робот с высокой грузоподъемностью.
Сверхмощный робот с дополнительными гибкими осями - Робот с высокой грузоподъемностью.
Кобот - 6-осевой роботизированный манипулятор для совместной работы с человеком в одном рабочем пространстве.
Инструмент - Шпиндели, лазерные головки, кусачки и т. д. Робот может содержать любое количество инструментов. Инструмент может быть добавлен только после выбора робота.
Составные инструменты - Сложные устройства, содержащие подвижные части. Например, захват с пальцами.
Неподвижный объект - Любой неподвижный объект (контроллер, корпус и т. д.).
Стол (неподвижный) - Статический стол
Стол (1 ось) - Поворотный стол (позиционер) с 1 осью
Стол (2 оси) - Поворотный стол (позиционер) с 2 осями
Рельс - Рельс или любая другая линейная ось. Обычно позволяет перемещать робота вдоль оси X.
Портал (2 оси) - Механизм с 2 линейными осями. Обычно позволяет перемещать робота вдоль осей X-Y.
Портал (3 оси) - Портал, механизм с 3 линейными осями. Обычно позволяет перемещать робота вдоль осей X-Y-Z.
Машинное оборудование - Универсальное оборудование с возможностью конфигурирования.
Параметрический ящик - Куб, с возможностью изменения его длины, ширины, высоты.
Параметрический стол - Стол, с возможностью изменения его длины, ширины, высоты, толщины и высоты ножек.
Параметрический токарно-фрезерный обрабатывающий центр - Параметрический станок (Токарный).
Параметрический вертикальный обрабатывающий центр - Параметрический станок (Фрезерный).
Из файла - Позволяет добавить механизм, экспортированный в файл .mmm. Дополнительную информацию о файлах .mmm см. в разделе "Библиотека механизмов".
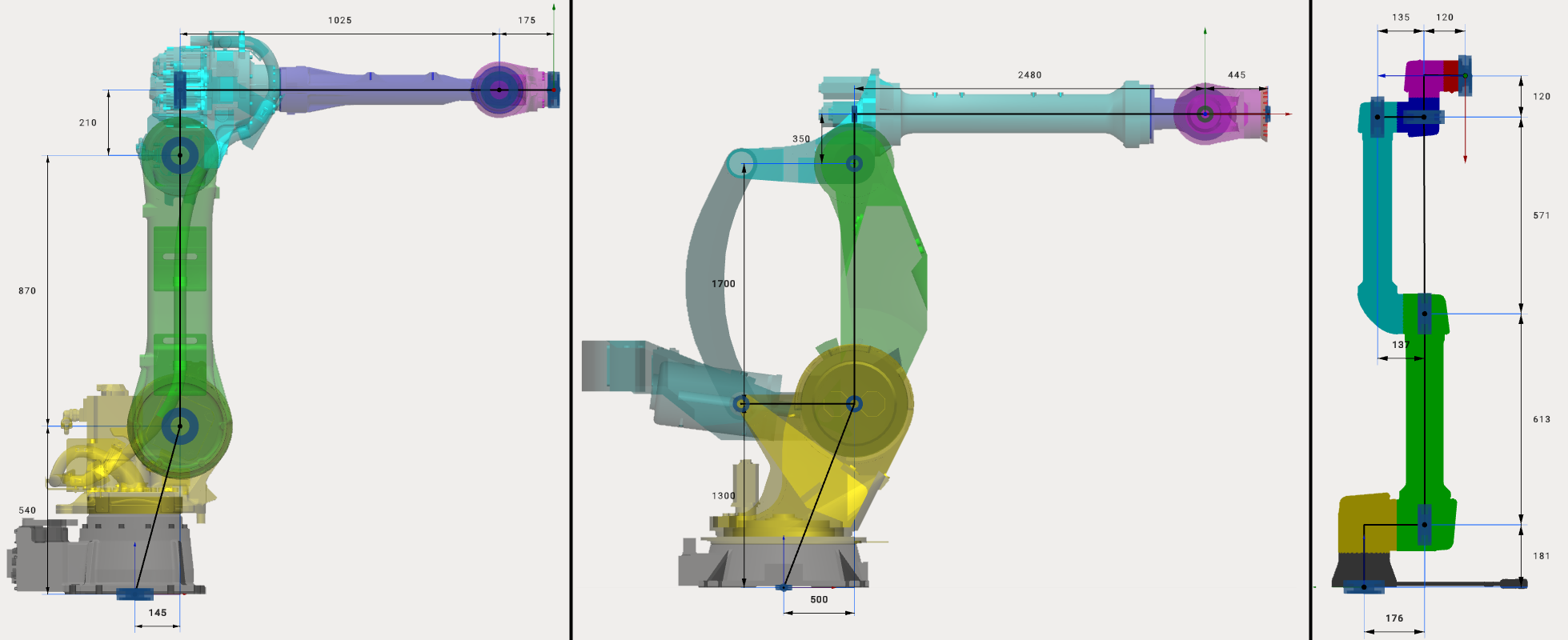
Роботы, тяжелые роботы и коботы имеют разные кинематические схемы: